Position control parameter12
PARAMETER DESCRIPTION 247
5.13.2 Position control parameter
Achieve accurate control function by setting with inverter via PG vector control mode.
Position instruction source comes from external pulse.
Position instruction source comes from the parameter
(relative position).
Position instruction source comes from the parameter
(absolute position).
Position control ratio
gain
Increase setting can improve the response of position
control, but may cause overshoot.
Position control feed
forward gain
Increase setting can improve the response of position
control, but may cause overshoot.
Position control feed
forward low pass filter
time
Control speed limit by
external pulse
Margin when reaching
position
Position command
response option
Position control function
When 12-04
(P.424)
=0,position function is determined by pulse(refer to parameter 09-07
(P.356)
for encoder input
type 2)
When 12-04
(P.424)
=1、2,position command is determined by parameter 12-20
(P.450)
~12-49
(P.479)
, relative
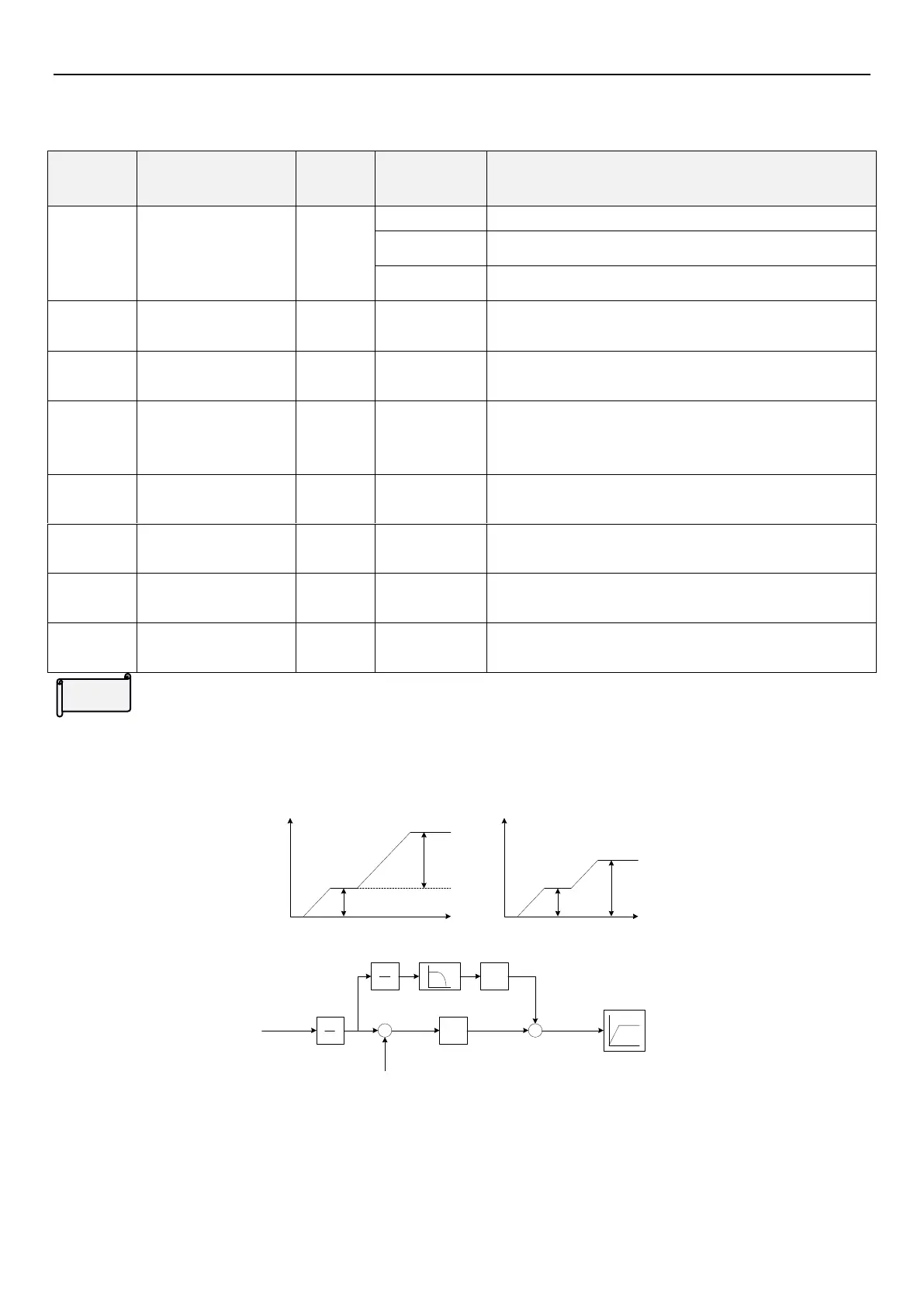
position=1,absolute position=2,examples are as follow:
20 turns
10 turns 10 turns
20 turns
Position control diagram
Position
instruction
Position
feedback
Electrical
gear
12-05
(P.425)
12-06
(P.426)
+
+
+
-
Position
instruction
12-07
(P.427)
12-08(P.428)
sPeed instruction
When position command originates by parameter,the speed limit of position control is determined by multi speed
command.When the multi-function input terminal is all 0,it is determined by 12-08
(P.428).
When the difference between the actual motor position and position command is smaller than the setting of
position arrival margin, it counts as arrival.If multi-function output terminal’s function is set to 21, then signal is
 Loading...
Loading...


