Speed and torque control parameter group11
PARAMETER DESCRIPTION 241
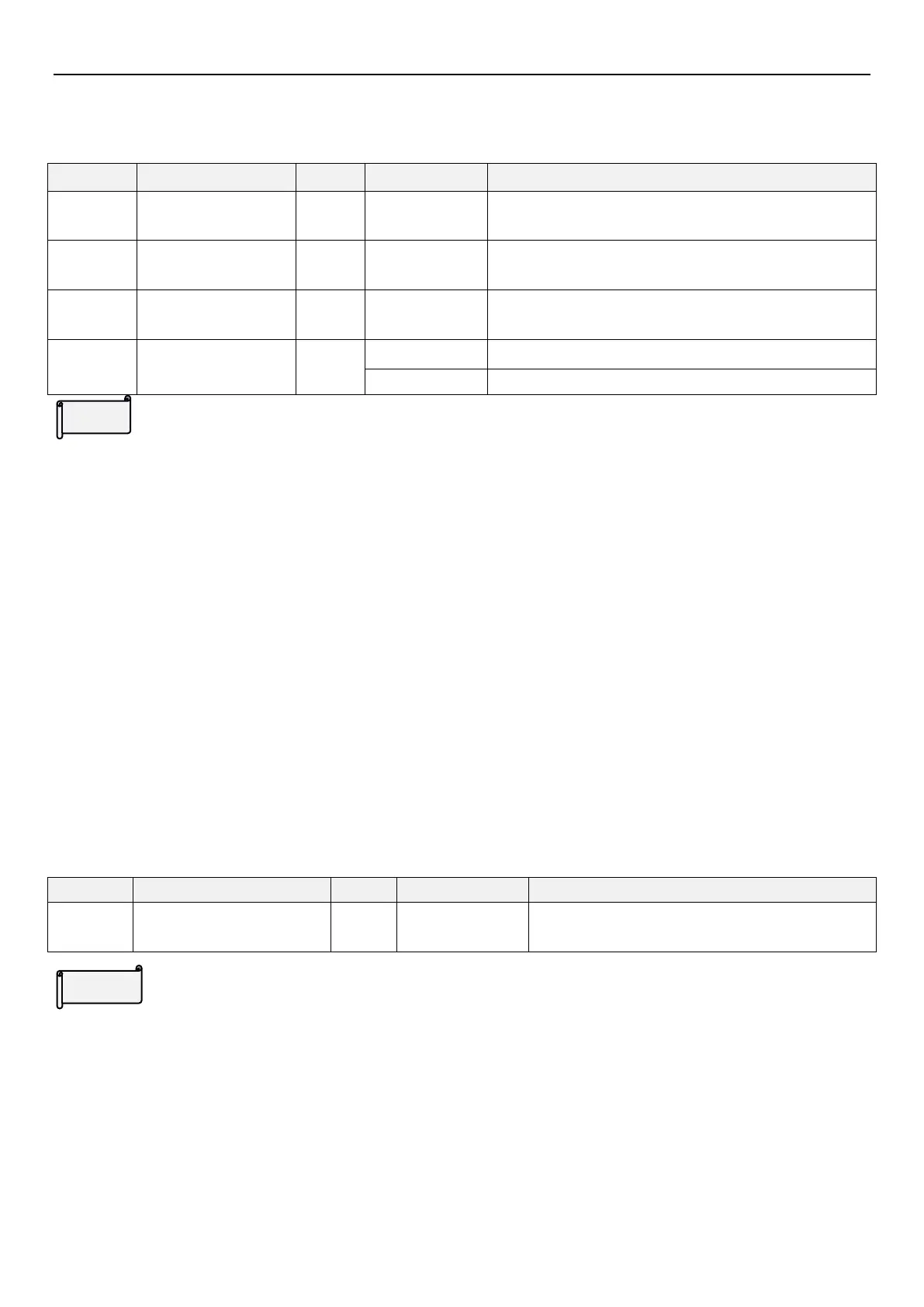
5.12.9 PM Motor current loop controller parameters
Adjust current loop responsiveness by setting PM current loop controller parameters.
Speed loop zero speed
bandwidth
Speed loop low speed
bandwidth
Speed loop high speed
bandwidth
Speed loop self-tuning
selection
Speed loop self-setting is effective
PM Motor current loop controller parameters
When 11-51(P.390) = 0, the speed loop PI parameters (11-00(P.320)、11-01(P.321)、11-03(P.323)、11-04(P.324)、
11-23(P.412)、11-24(P.413)) are set manually;
when 11-51(P.390) = 1, the speed The loop PI parameters (11-00(P.320)、11-01(P.321)、11-03(P.323)、11-04(P.324)、
11-23(P.412)、11-24(P.413)) are automatically set, and with the reasonable setting of system inertia (05-17/05-18),
Can achieve the ideal speed loop response characteristics; please adjust 11-48(P.387)、11-49(P.388)、11-50(P.389)
respectively according to the responsiveness requirements. The larger the setting, the faster the speed loop
response. If the setting is too large, it will cause system oscillation. We suggest increases
11-48(P.387)~11-50(P.389) slowly, and return to the previous setting value right after the system oscillates.
5.12.10 Velocity loop output low-pass filter time constant
Set the low-pass filter time of the torque command output by the velocity loop
Velocity loop output low-pass
filter time constant
Set velocity loop output low-pass filter time constant
If vibration is caused due to low mechanical rigidity, please gradually increase this value based on the increment of
1.0ms, usually not required to be set.
 Loading...
Loading...


