Position control parameter12
PARAMETER DESCRIPTION 250
Under closed-loop speed mode,set external terminal function to single point positioning(03-03(P.80)=68 for
instance).When terminal M0 is OFF,it is under pure speed mode,when terminal M0 is ON,Inverter goes from
current functioning frequency to accelerate/decelerate curve,runs to positioning frequency(parameter
12-12(P.432)),operates under said positioning frequency until Z phase is detected,switch to the position control
which takes the value of 12-11(P.431) as target position,position control gain(12-05(P.425)),arriving position output
terminal and position margin (12-09(P.429)) shares with position mode Pt、Pr.
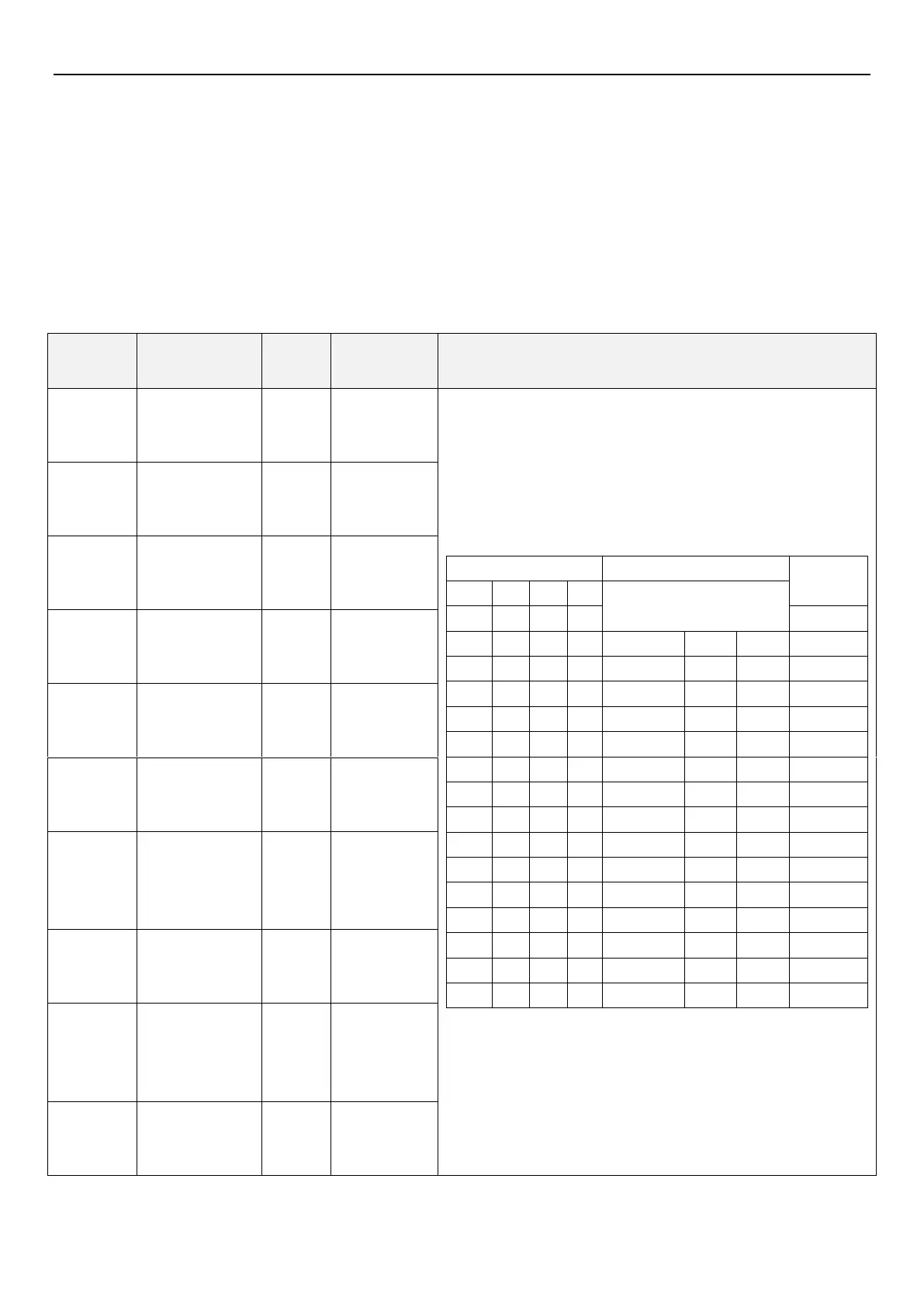
5.13.5 Position command
Set the position command of position control mode by digital input terminal.
Number of cycle
position
command 1
Number of pulse
of position
command 1
Number of cycle
position
command 2
Number of pulse
of position
command 2
Number of cycle
position
command 3
Number of pulse
of position
command 3
Number of cycle
position
command
4
Number of pulse
of position
command 4
Number of cycle
position
command
5
Number of pulse
of position
command 5
 Loading...
Loading...


