Speed and torque control parameter group11
PARAMETER DESCRIPTION 236
current during acceleration.
11-10
(P.330)
is used to make the direction
positioning for
PM motor pole more effective
during operation, the
current for pulling in, 05-05
(P.306)
(the motor rated current) is set to 100%, set the d-axis current during operation at
a constant speed. Please make adjustment in the following situations:
Increase this setting when unstable due to offset during constant speed operation. If there is too much current
when driving a normal load at a constant speed, then reduce this value.
11-11(P.331) is the PM motor speed observer filtering time constant, which usually does not need to be adjusted.
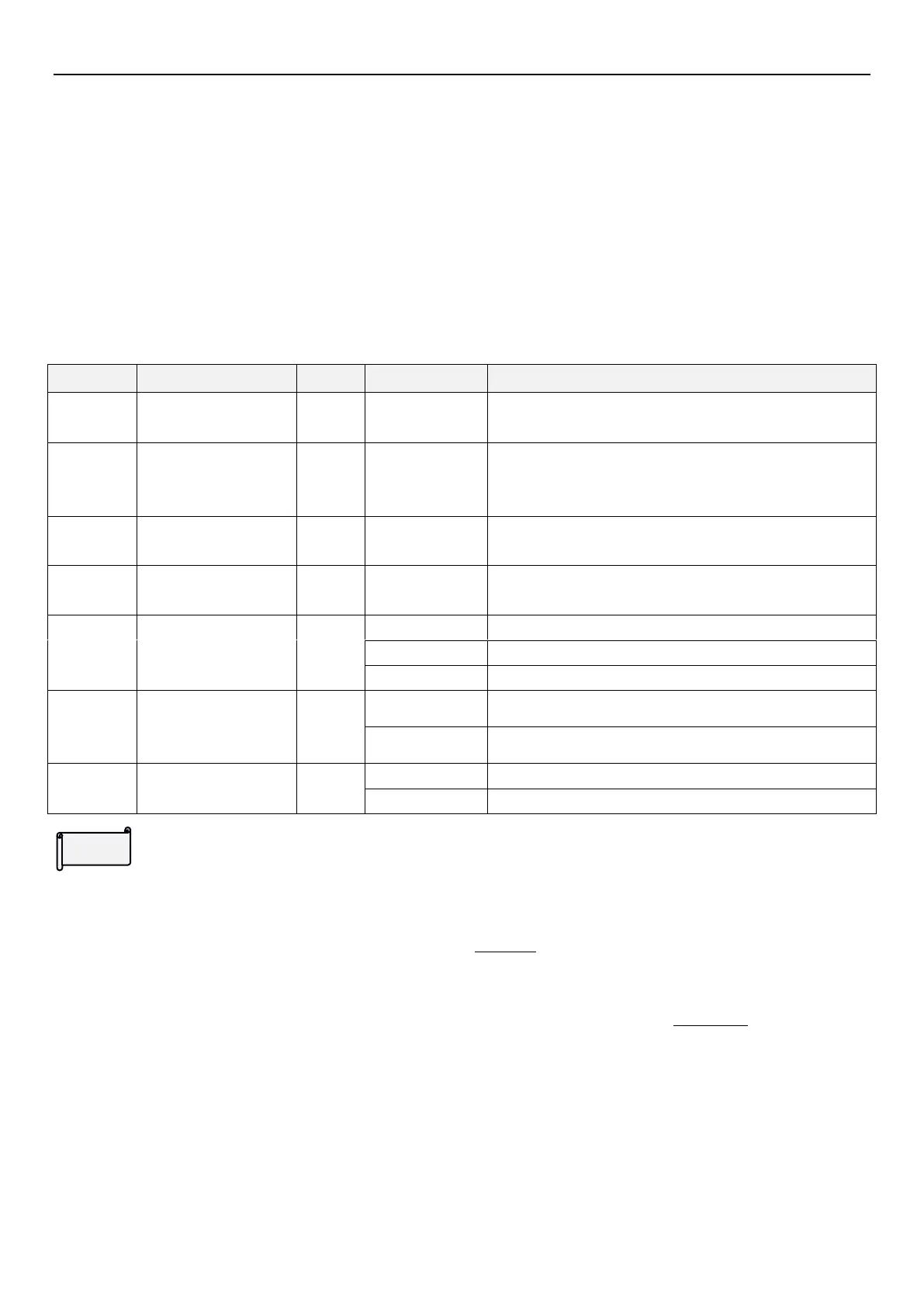
5.12.4 Torque control parameter
Used to select the inverter speed control or torque control.
Speed limit in torque control is valid when 11-17 (P.406) = 0.
When it is set to 100%, the speed limit value will correspond
to the setting value of 05-04 (P.305).
Bias value correspond to setting value of P.305 when it is set
to 100%
Given by analog or pulse input.
Given by communication mode.
Speed is limited according to 11-13 (P.402) and 11-14
(P.403)
Frequency command source(it is decided according to
00-16(P.79) )
Unidirectional speed
limit bias
Unidirectional speed limit bias is valid.
Torque control parameter
11-12(P.401) is used to set the torque command, actual torque command = 11-12(P.401)* motor rated torque;
according to the motor rated torque formula:
,
P(W) is from 05-01(P.302), ω(rad/s)can be find according to parameter 05-06(P.307):
.
Input torque command polarity
Direction of motor output torque depends on the polarity of torque command and it has nothing to do with Run
command. The following sheet shows the relationship between torque command, Run command, motor run
direction and inverter run LED on keypad.
 Loading...
Loading...


