286 Rockwell Automation Publication 2198-UM002L-EN-P - October 2021
Chapter 9 Kinetix 5700 Safe Torque-off Function
Out of Box State
Kinetix 5700 servo drives are capable of safe torque-off (STO) functionality in
Hardwired STO mode or Integrated STO mode. Out of the box, the
Kinetix 5700 servo drives are in Hardwired STO mode, which means they are
ready for hardwired connections to the safety (STO) connector. To bypass the
hardwired safety function, jumper wires must be installed in the STO
connector.
Out of the box, you can use Kinetix 5700 servo drives in Integrated STO mode
only after a Motion and Safety or Safety-only connection has been established
at least once in the Logix Designer application.
How to Recognize Hardwired STO Mode
You can read the safety control state from the axis tag AxisSafetyState, or by
using an MSG command in the Logix Designer application to read the Safety
Supervisor status.
In Hardwired STO mode, if STO inputs are OFF then Safety Supervisor state is
Not Configured (8) and if STO inputs are ON then Safety Supervisor state is
Not Configured, torque permitted (51).
IMPORTANT
Out of the box, Kinetix 5700 servo drives are in Hardwired STO mode.
IMPORTANT
To bypass the STO feature while commissioning or testing the drive,
the drive must be configured for Hardwired STO mode. Refer to Safe
Torque-off Feature Bypass on page 300 for a wiring example.
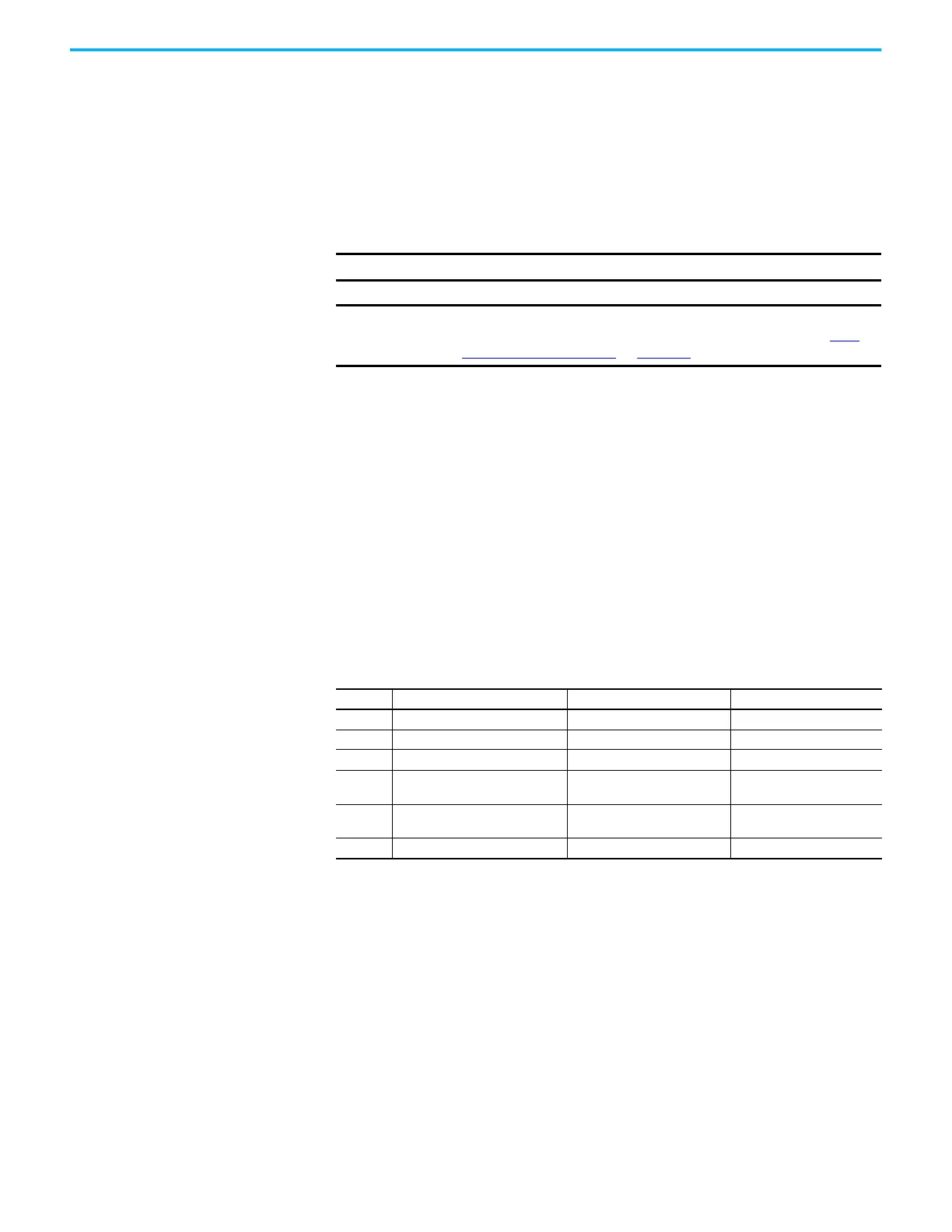
Table 155 - Safety Supervisor States
Value Safety Supervisor State Definition Safety Mode
2 Configured (no safety connection) No active connections Integrated
4 Running Normal running state Integrated
7 Configuring Transition state Integrated
8 Not Configured
Hardwired STO mode with torque
disabled
Hardwired (out of the box)
51 Not Configured (torque permitted)
Hardwired STO mode with torque
permitted
Hardwired (out of the box)
52 Running (torque permitted) STO bypass state Integrated

 Loading...
Loading...










