ECDIS-E User Guide Navigation Tools
65934012 5-25
The following are defined as LOP fix types:
Estimated Position Fix (EP)
Visual Fix (V)
Range Fix (R)
Composite Type Fix (VR)
A minimum of three LOPs are required for a Visual,
Range, or Composite type fix. Only two LOPs are
required for an EP Fix.
The table below gives a description of each LOP fix label.
Label Description
EP Position was obtained using two points.
V Position was obtained by making only bearing observations.
R Position was obtained by making only range observations.
VR Position was obtained by making both bearing and range observations.
Using a LOP Position Sensor
A LOP fix may be used as the active data source
for the position sensor, see Position Values in
Sensor Management.
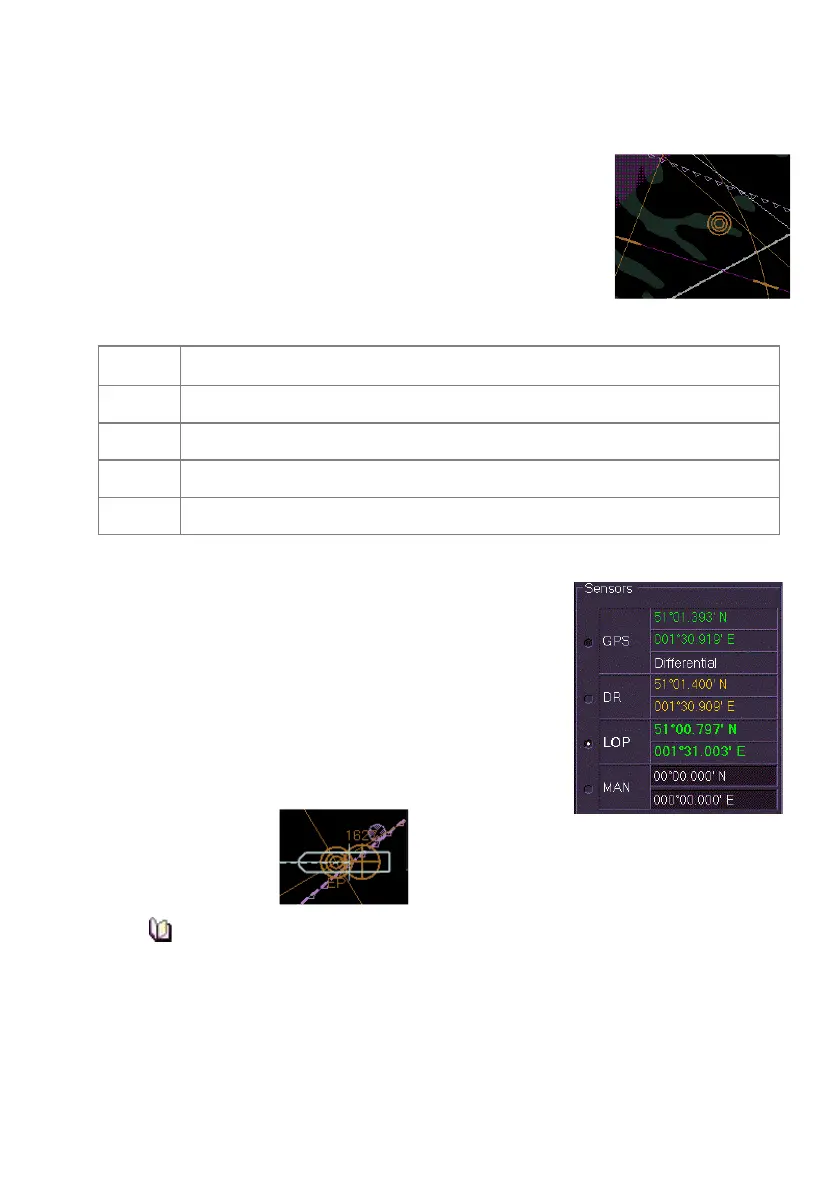
The LOP Position Sensor displays the
Latitude/Longitude coordinates of the permanent
fix.
If the LOP Position sensor is selected, own ship is
re-positioned so that its CCRP is at the centre of
the permanent fix symbol.
The amount of time that the LOP position sensor will be considered
usable after a fix is set in the configuration tool (default time 300
seconds). Note that LOP position sensor data is dead reckoned
between each fix, and this data will become degraded after a
period of time.