306 Rockwell Automation Publication 2198-UM002L-EN-P - October 2021
Chapter 9 Kinetix 5700 Safe Torque-off Function
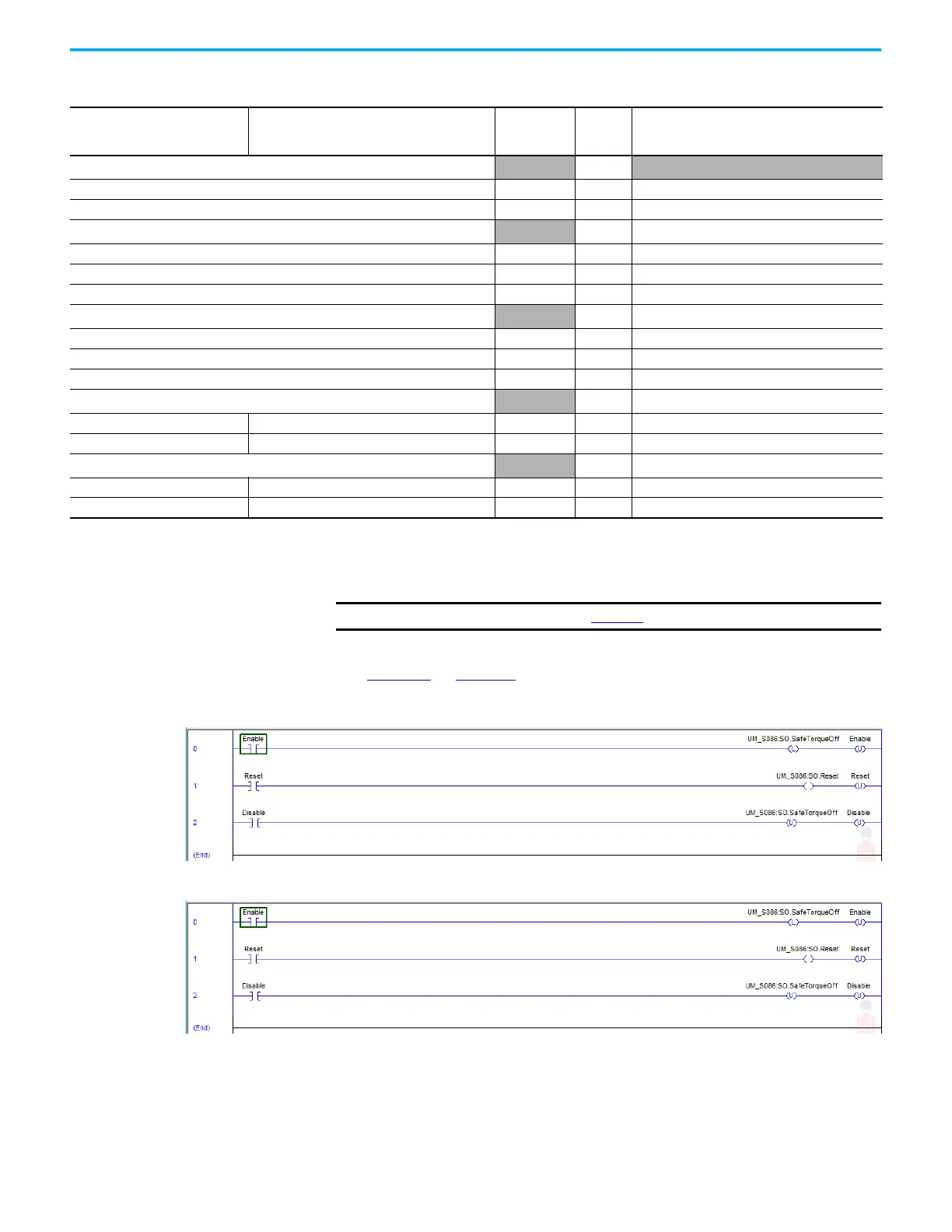
In these examples, the appropriate STO bit permits torque when the bit is high
(see Table 170
on page 304 for changes in STO tag names).
Figure 146 - STO Function (Logix Designer, version 30 or earlier)
Figure 147 - STO Function with STO Only (Logix Designer, version 31 or later)
Table 172 - Dual-axis Inverter Integrated STO Specifications
Logix Designer Tag Name
Safe Stop Only - No Feedback Tag Names
Studio 5000 Logix Designer
(version 31 and later)
Attribute
[bit]
Type Description
SI.ConnectionStatus
(1)
(2)
DINT
SI.RunMode [0] BOOL Combinations of the RunMode and
SI.ConnectionFaulted [1] BOOL ConnectionFaulted states
SI.Status1
(1)
(3)
SINT Motion Safety 1
SI.TorqueDisabled1 [0] BOOL 0 = Torque Permitted; 1 = Torque Disabled
SI.SafetyFault1 [6] BOOL 1 = STO Fault present
SI.ResetRequired1 [7] BOOL 1 = A reset is required
SI.Status2
(1)
(3)
SINT Motion Safety 2
SI.TorqueDisabled2 [0] BOOL 0 = Torque Permitted; 1 = Torque Disabled
SI.SafetyFault2 [6] BOOL 1 = STO Fault present
SI.ResetRequired2 [7] BOOL 1 = A reset is required
SO.Command1
(1)
(4)
SINT Motion Safety 1
SO.SafeTorqueOff1 SO.STOOutput1 [0] BOOL 0 = Disable Permit; 1 = Permit Torque
SO.Reset1 SO.ResetRequest1 [7] BOOL 0-->1 = Reset STO Fault
SO.Command2
(1)
(4)
SINT Motion Safety 2
SO.SafeTorqueOff2 SO.STOOutput2 [0] BOOL 0 = Disable Permit; 1 = Permit Torque
SO.Reset2 SO.ResetRequest2 [7] BOOL 0-->1 = Reset STO Fault
(1) Bits not listed are always zero.
(2) ConnectionStatus is determined by the Safety Validator in the GuardLogix controller.
(3) Status is sent from the drive to the controller using integrated safety protocol.
(4) The Command is sent from the controller to the drive using integrated safety protocol.
IMPORTANT
Only the data listed in Table 172 is communicated with SIL 3 integrity.

 Loading...
Loading...










