Rockwell Automation Publication 2198-UM002L-EN-P - October 2021 425
Appendix F Motor Control Feature Support
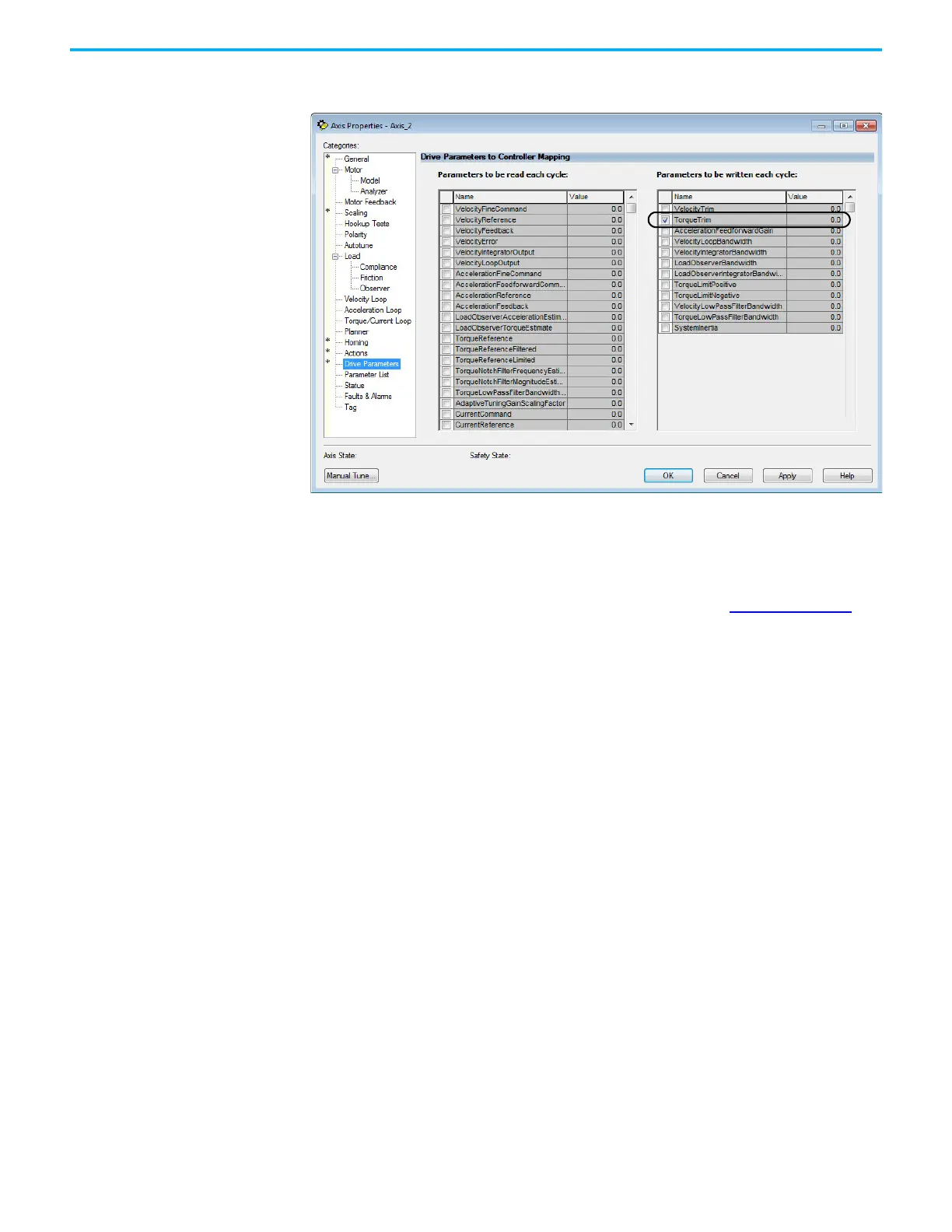
11. Select the Drive Parameters category.
The Drive Parameters to Controller Mapping dialog box appears.
When using SLAT with Kinetix 5700 drives, the velocity command is sent to the
drive via an MAJ instruction or MDS instruction (2198-xxxx-ERS4 and
2198-xxxx-ERS3 series B drives, firmware 9.001 or later). The torque command
is sent via the cyclic write TorqueTrim attribute. See the Integrated Motion on
the EtherNet/IP Network Reference Manual, publication MOTION-RM003
, for
more information on cyclic read and cyclic write.
For MAJ instructions:
• When using SLAT, start the axis with the MSO instruction.
• The VelocityCommand is sent via the MAJ instruction.
• The TorqueCommand is sent to AxisTag.TorqueTrim.
• To make changes to the VelocityCommand, you must re-trigger the MAJ
with the Speed value or use a MCD (motion change dynamics)
instruction.
• To stop the axis use a MAS instruction.
• The axis accelerates and decelerates at the MAJ instruction programmed
Acceleration and Deceleration rates.
• You can also change the rates using the MCD instruction.

 Loading...
Loading...










