Gocator Line Profile Sensors: User Manual
Gocator Web Interface • 425
Robot Pose
This tool is not supported on A and B revision Gocator 2100 and 2300 sensors. It will however
appear in emulator scenarios created using these sensors.
The Feature Robot Pose tool takesgeometric features as input and outputs positional and rotational
values. You can use these values in a robot system to control the robot.
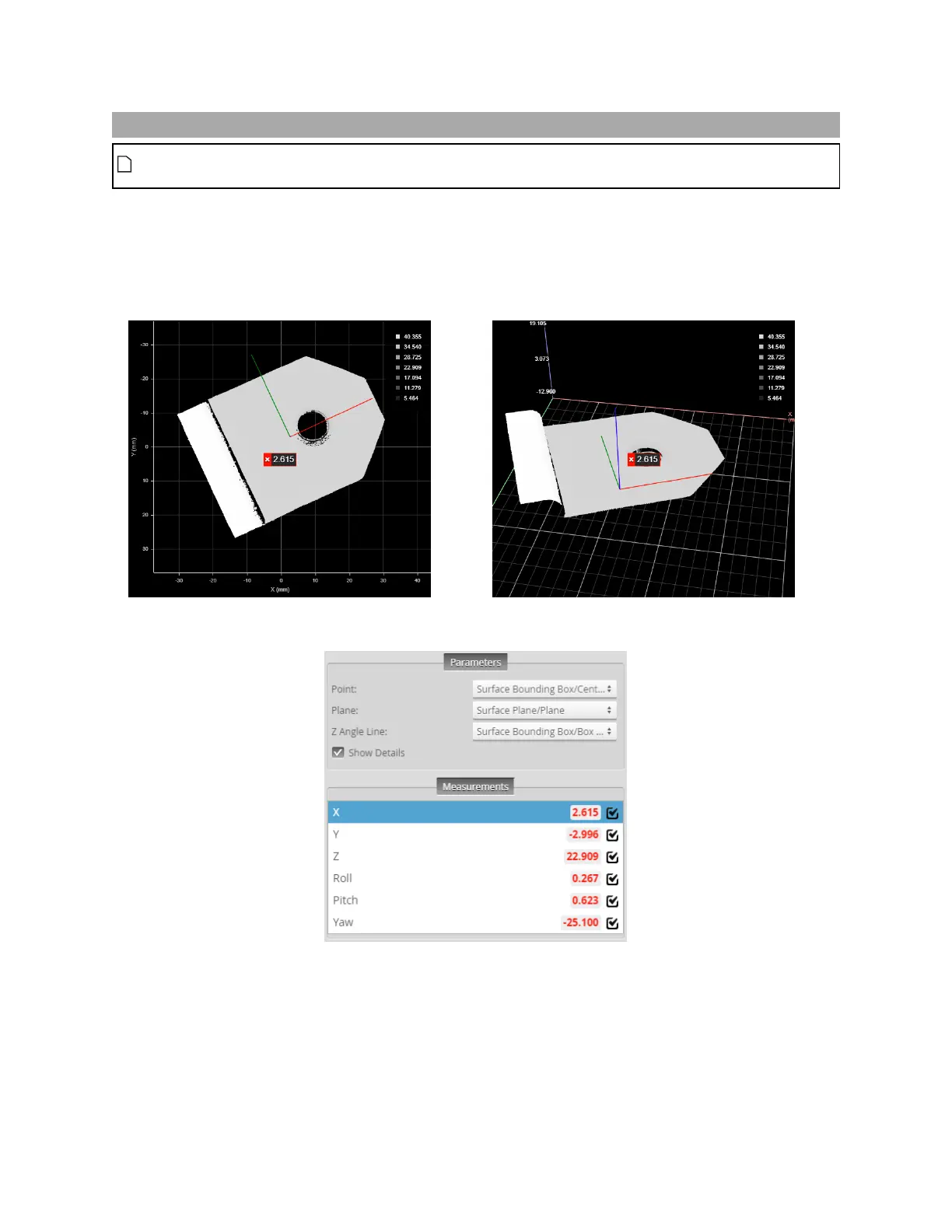
In the following images, the Robot Pose tool has returned positional (X, Y, and Z)and rotational (roll,
pitch, and yaw) information on a part.
2DView 3DView
Measurement Panel
At a minimum, the Robot Pose tool needs the following input:
l A Point geometric feature to determine XYZ information
l A Plane geometric feature to determine roll and pitch (rotation around the X and Y axes)
 Loading...
Loading...

