160
"P" Group: Other Parameters Section 3-9
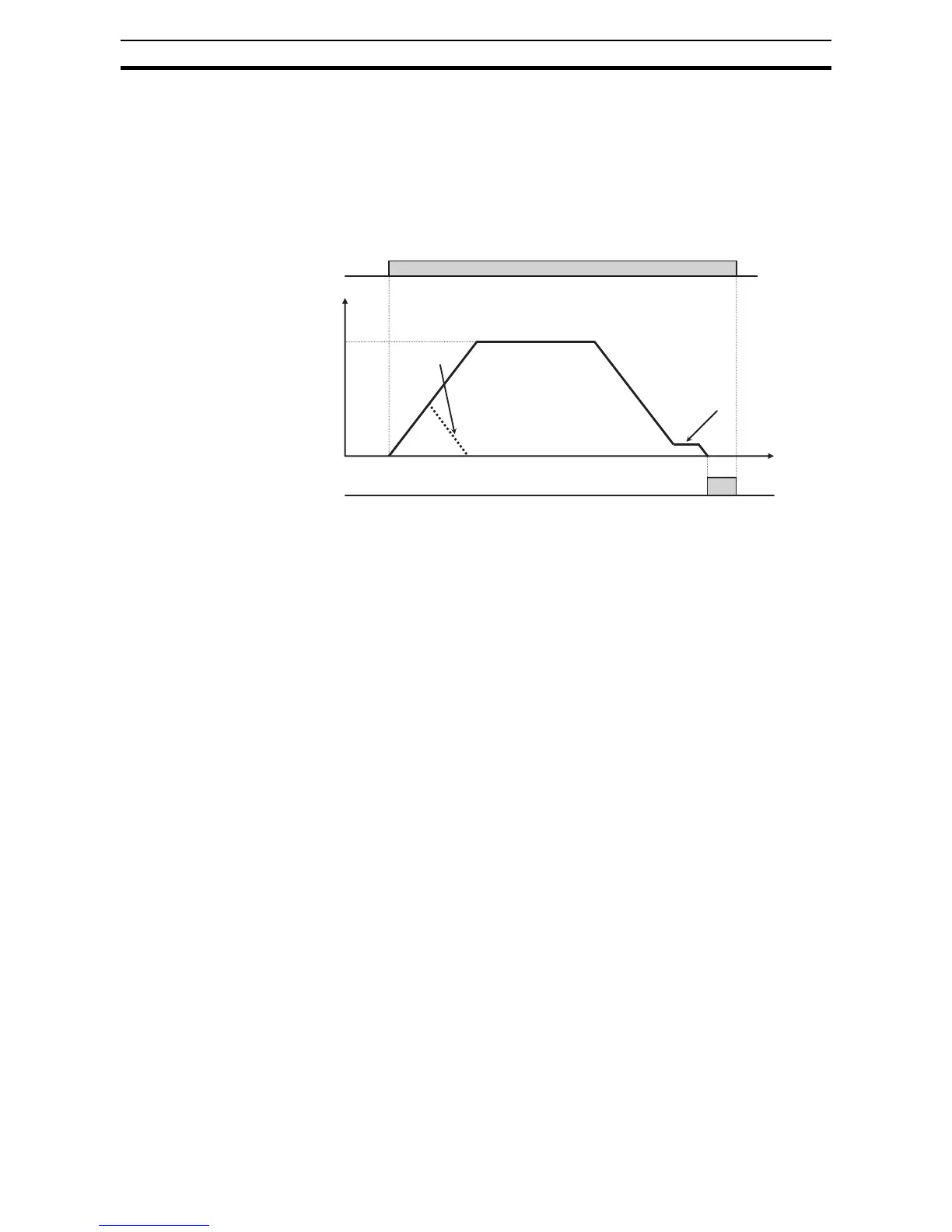
In the simple positioning mode, the inverter runs the motor until the machine
reaches the target position according to the following settings, and then stops
the motor with DC braking.
<1> Position setting
<2> Speed setting (frequency setting)
<3> Acceleration and deceleration time
(DC braking state is held until RUN command is turned off.)
• In simple positioning mode, the frequency and acceleration/deceleration
are according to current settings as same as normal operation.
• Depending on DC braking and creep speed setting, positioning may go off
the point.
• If the position value specified by the position setting is small, the inverter
may decelerate the motor for positioning before its speed reaches the
speed setting.
• In simple positioning mode, the rotation direction setting (FW or RV) of the
operation command is ignored. The operation command simply functions
as the signal to run or stop the motor. The motor runs in the forward direc-
tion when the value of "target position" -(minus) "current position" is posi-
tive, or in the reverse position when the value is negative.
• The position at power up is home position (Position data = 0). If power is
removed, current position data is lost.
• When the operation command is turned on with 0 specified as the posi-
tion setting, positioning is completed (with DC braking) without running
the motor.
•Specify "03 (only to reset a trip)" for reset mode selection (C102). If a value
other than "03" is specified to C102, the current position counter will be
cleared when the inverter reset terminal (or reset key) is turned on. Be
sure to specify "03" for reset mode selection (C102) if you intend to use the
value of the current position counter for operation after recovering the
inverter from tripping by turning on the reset terminal (or reset key).
• If the PCLR function is assigned to a input terminal, turning it on to clear
the current position counter. (But note that the internal position deviation
counter is also cleared at the same time.)
• In simple positioning mode, ATR terminal is invalid. (Torque control does
not work.)
• If current position is out of the set range, inverter will be tripped (E83) and
coasting status.
ON
Output freq.
Position
Set speed
RUN command
ON
POK output signal
Creep speed (P015)
If the position value specified by the position setting is small, the
inverter decelerates the motor for positioning before the speed
reaches