265
Network Protocol Reference Section B-3
Data:
• A function command is set here.
• The data format used in the MX2 series is corresponding to the Modbus
data format below.
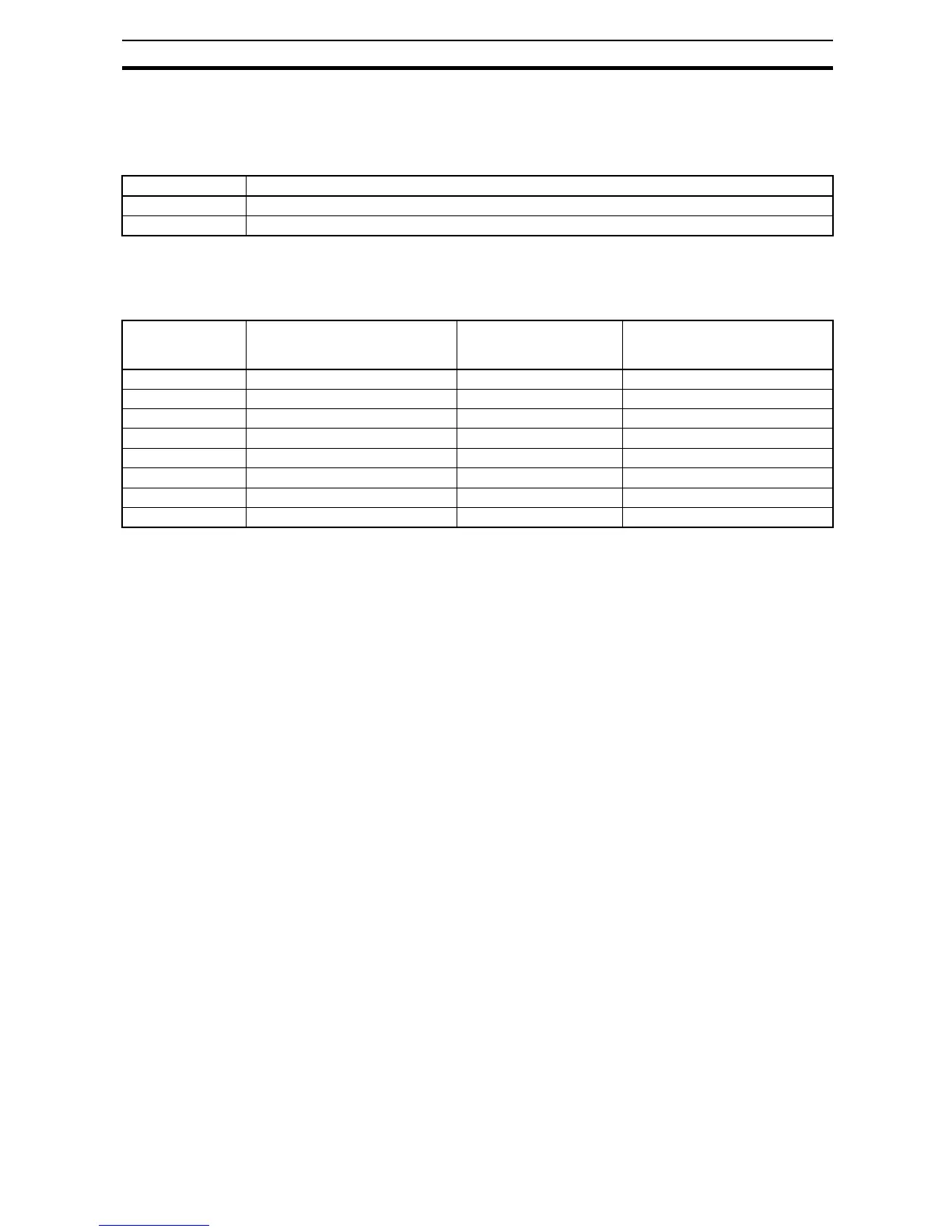
Function code:
Specify a function you want to make the inverter execute. Function codes
available to the MX2 series are listed below.
Error check:
Modbus-RTU uses CRC (Cyclic Redundancy Check) for error checking.
• The CRC code is 16-bit data that is generated for 8-bit blocks of arbitrary
length.
• The CRC code is generated by a generator polynomial CRC-16 (X16+
X15+ X2+ 1).
Header and trailer (silent interval):
Latency is the time between the reception of a query from the master and
transmission of a response from the inverter.
• 3.5 characters (24 bits) are always required for latency time. If the latency
time shorter than 3.5 characters, the inverter returns no response.
• The actual transmission latency time is the sum of silent interval
(3.5 characters long) + C078 (transmission latency time).
Name of Data Description
Coil Binary data that can be referenced and changed (1 bit long)
Holding Register 16-bit data that can be referenced and changed
Function Code Function Maximum data size
(bytes available per
message)
Maximum number of data
elements available per message
0 1 h Read Coil Status 4 32 coils (in bits)
0 3 h Read Holding Resistor 32 16 registers (in bytes)
0 5 h Write in Coil 2 1 coil (in bits)
0 6 h Write in Holding Register 2 1 register (in bytes)
0 8 h Loopback Test – –
0 F h Write in Coils 4 32 coils (in bits)
1 0 h Write in Registers 32 16 registers (in bytes)
17h Read/Write Holding Registor 32 16 registers (in bytes)