238
Monitoring Trip Events, History, & Conditions Section 6-2
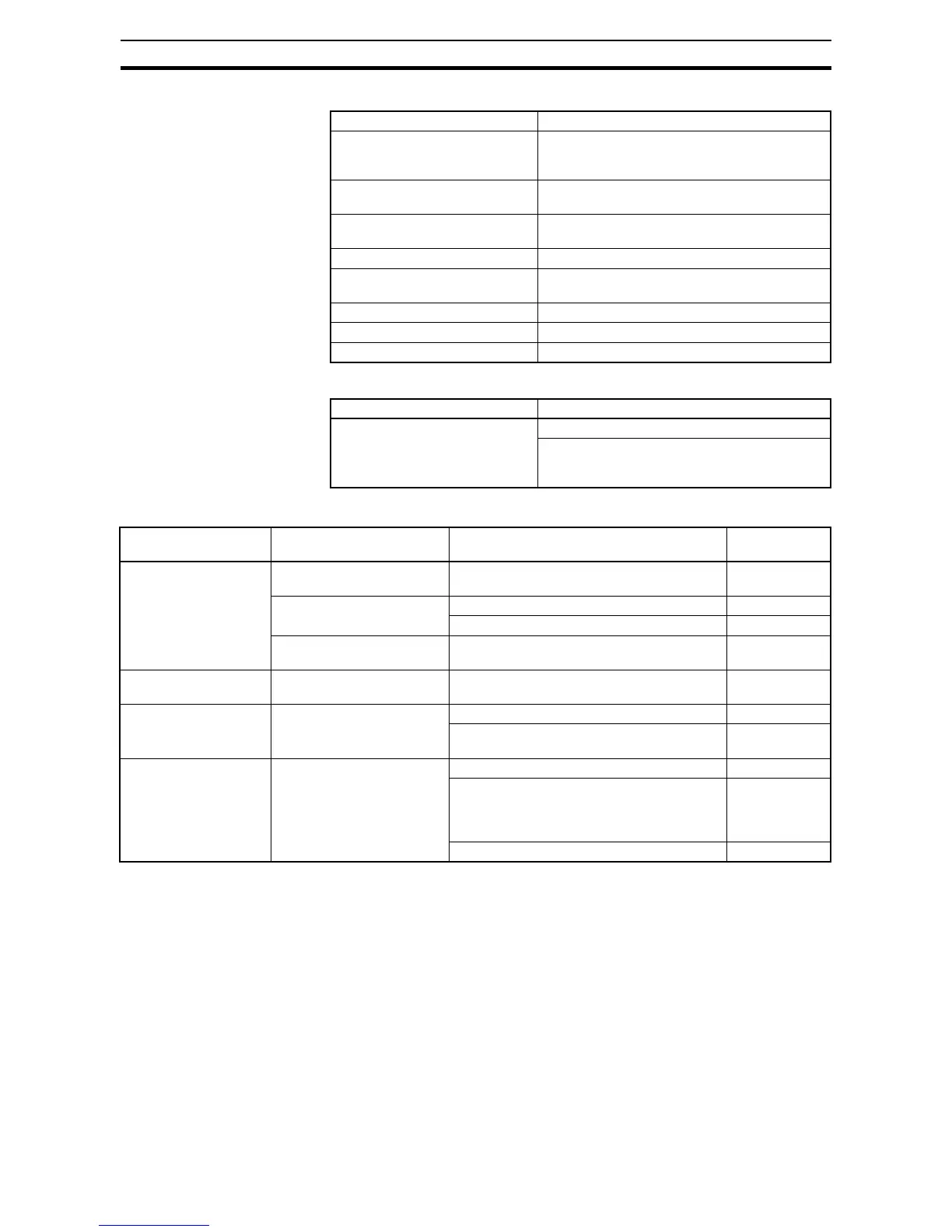
19. No response over Modbus communication.
20. When inverter starts, ECB (Earth leakage Circuit Breaker) trips.
21. PM troubleshooting information.
6-2 Monitoring Trip Events, History, & Conditions
6-2-1 Fault Detection and Clearing
The microprocessor in the inverter detects a variety of fault conditions and
captures the event, recording it in a history table. The inverter output turns
OFF, or "trips" similar to the way a circuit breaker trips due to an over-current
condition. Most faults occur when the motor is running (refer to the diagram to
the right). However, the inverter could have an internal fault and trip in Stop
Mode.
In either case, you can clear the fault by pressing the Stop/Reset key. Addi-
tionally, you can clear the inverter's cumulative trip history by performing the
Possible Cause(s) Corrective Action
New parameter is not updated. If C071, C074 or C075 is changed, cycle power or
reset inverter by turning RS terminal ON and
OFF.
Incorrect setting of RUN
command source (A002/A202).
Set RUN command source (A002/A202) to 03.
Incorrect setting of Frequency
source (A001/A201).
Set frequency source (A001/A201) to 03.
Incorrect setting of com. speed. Check communication speed (A071).
Incorrect setting or duplication of
Modbus address.
Check Modbus address (A072).
Incorrect setting of com. parity. Check communication parity (A074).
Incorrect setting of com. stop bit. Check communication stop bit (A075).
Incorrect wiring. Check communication wiring at SP,SN terminals.
Possible Cause(s) Corrective Action
Leak current of inverter is
excessive.
Reduce carrier frequency (A083).
Increase current sensor level of ECB or replace
ECB with another one having higher current
sensor level.
Operation status Symptom Adjustment method Adjustment
item
Starting Trouble is caused when
reverse run.
Enable to the initial magnet position estimation
function.
H123
Generate out-of-step.
Generate overcurrent trip.
Increase the starting current. H117
Increase the starting time. H118
Need for early starting. Enable to the initial magnet position estimation
function, and reduce the starting time.
H118, H123
Running under minimum
frequency (H121)
Motor runs unsteadily. Increase the starting current. H117
Running around mini-
mum frequency (H121)
Motor generates an impact.
Generate overcurrent trip.
Adjust the speed response. H116
Adjust the minimum frequency when a load
change.
H121
Runing over minimum
frequency (H121)
Motor generate a hunting. Adjust the speed response. H116
Reduce the stabilization constant.
(When value is too small, you may not be able
to obtain motor torque and motor will generate
inpact or overcurrent trip near H121)
H119
Increase the no-load current. H122