141
"C" Group: Intelligent Terminal Functions Section 3-7
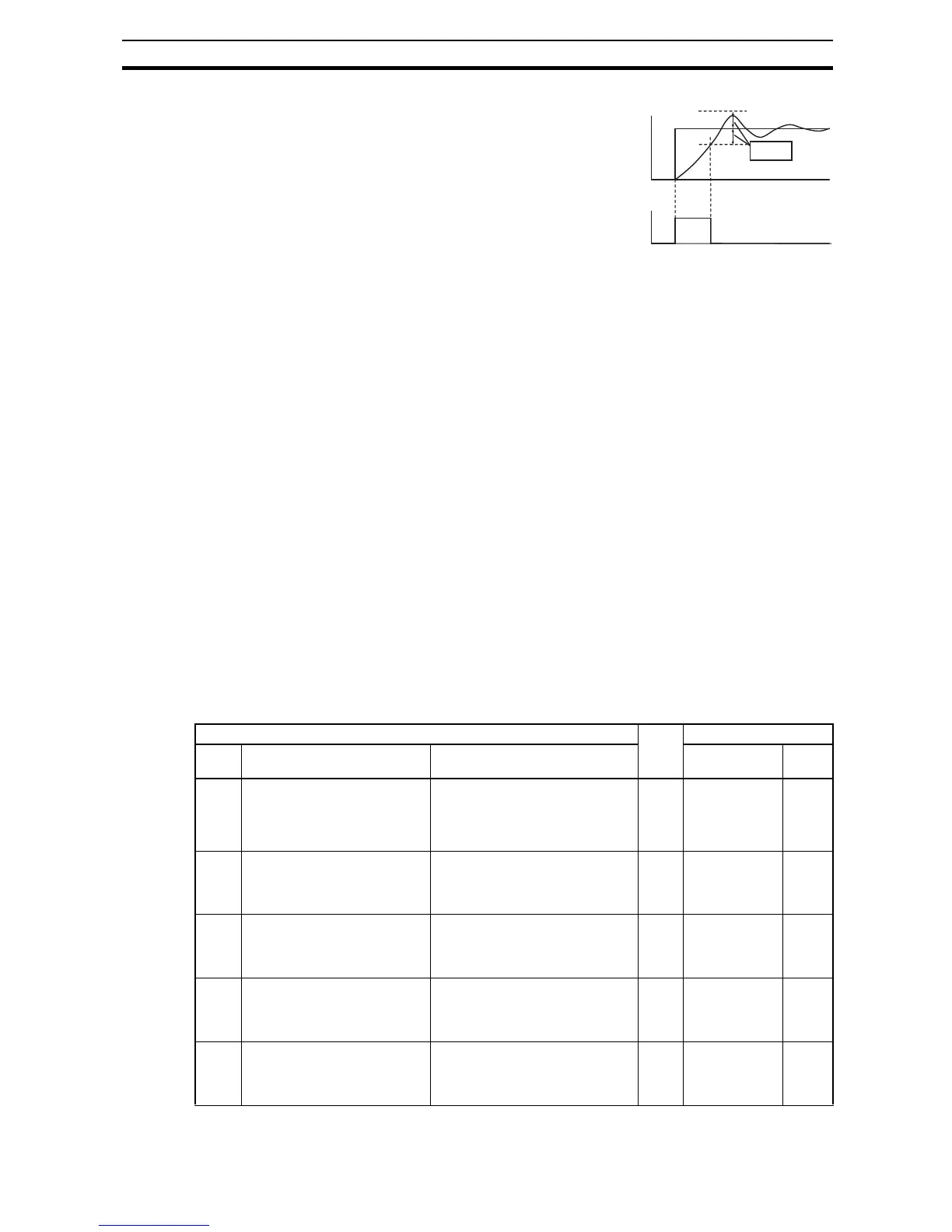
PID FBV Output - The Error for the PID
loop is the magnitude (absolute value)
of the difference between the Set point
(desired value) and Process Variable
(actual value). The PID output deviation
signal [OD] (output terminal function
option code 04) indicates when the
error magnitude has exceeded a mag-
nitude you define.
Over/Under-torque Output - The
inverter outputs the over/under-torque signal when it detects that the esti-
mated motor output torque exceeds the specified level. To enable this func-
tion, assign parameter "07" (OTQ: over/under-torque signal) to an intelligent
output terminal. Over-torque or under-torque can be selected by function
C054.
This function is effective only when the V/F characteristic curve selection
"A044" or "A244" is the sensorless vector control. With any other V/F charac-
teristic curve selected the output of the OTQ signal is unpredictable. When
using the inverter for a lift, use the OTQ signal as the trigger to stop braking.
Use the frequency arrival signal as the trigger to start braking.
Electronic Thermal Warning Output - Please refer to page 210 for detailed
information.
Zero speed detection Output - The inverter outputs the 0 Hz speed detec-
tion signal when the inverter output frequency falls below the threshold fre-
quency specified in the zero speed detection level (C063).
To use this function, assign parameter "21" to one of the intelligent output ter-
minals [11] to [12] (C021 to C022), or to the alarm relay output terminal (C026).
This function applies to the inverter output frequency when the V/F character-
istic curve selection is based on the constant torque (VC), reduced torque
(VP), free-V/F or sensorless vector control.
Heat Sink Overheat Warning Output - The inverter monitors the tempera-
ture of its heat sink, and outputs the heat sink overheat warning (OHF) signal
when the temperature exceeds the heat sink overheat warning level specified
in parameter C064.
t
C044
1
0
t
Output
PID Error (PV-SP) deviation threshold
[OD]
output
"C" Function Run
Mode
Edit
Defaults
Func.
Code
Name Description EU Units
C040 Output mode of overload warn-
ing
Two option codes:
00... During accel., decel. and
constant speed
01... During constant speed only
8 01 –
C041 Overload warning level Sets the overload warning signal
level between 0% and 200% (from
0 to two time the rated current of
the inverter)
8 Rated current
for each
inverter model
A
C241 Overload warning level,
2
nd
motor
Sets the overload warning signal
level between 0% and 200% (from
0 to two times the rated current of
the inverter)
8 Rated current
for each
inverter model
A
C042 Frequency arrival setting for
acceleration
Sets the frequency arrival setting
threshold for the output frequency
during acceleration, range is 0.0
to 400.0 Hz
*1
8 0.0 Hz
C043 Frequency arrival setting for
deceleration
Sets the frequency arrival setting
threshold for the output frequency
during deceleration, range is 0.0
to 400.0 Hz
*1
8 0.0 Hz