150
"H" Group: Motor Constants Functions Section 3-8
3-8-2 Sensorless Vector Control
This sensorless vector control enables the inverter to accurately operate the
motor with a high starting torque, even at low speed. It estimates and controls
the motor speed and output torque based on the inverter output voltage, out-
put current, and the set motor constants on the inverter. To use this function,
specify "03" for the V/F characteristic curve selection (A044/A244).
In prior to use this function, be sure to make optimum setting of the motor con-
stants, which is described before.
When using this function, observe the following precautions:
1. If you use the inverter to drive a motor of which the capacity is two class
lower than the maximum applicable capacity of the inverter, you may not
be able to obtain adequate motor characteristics.
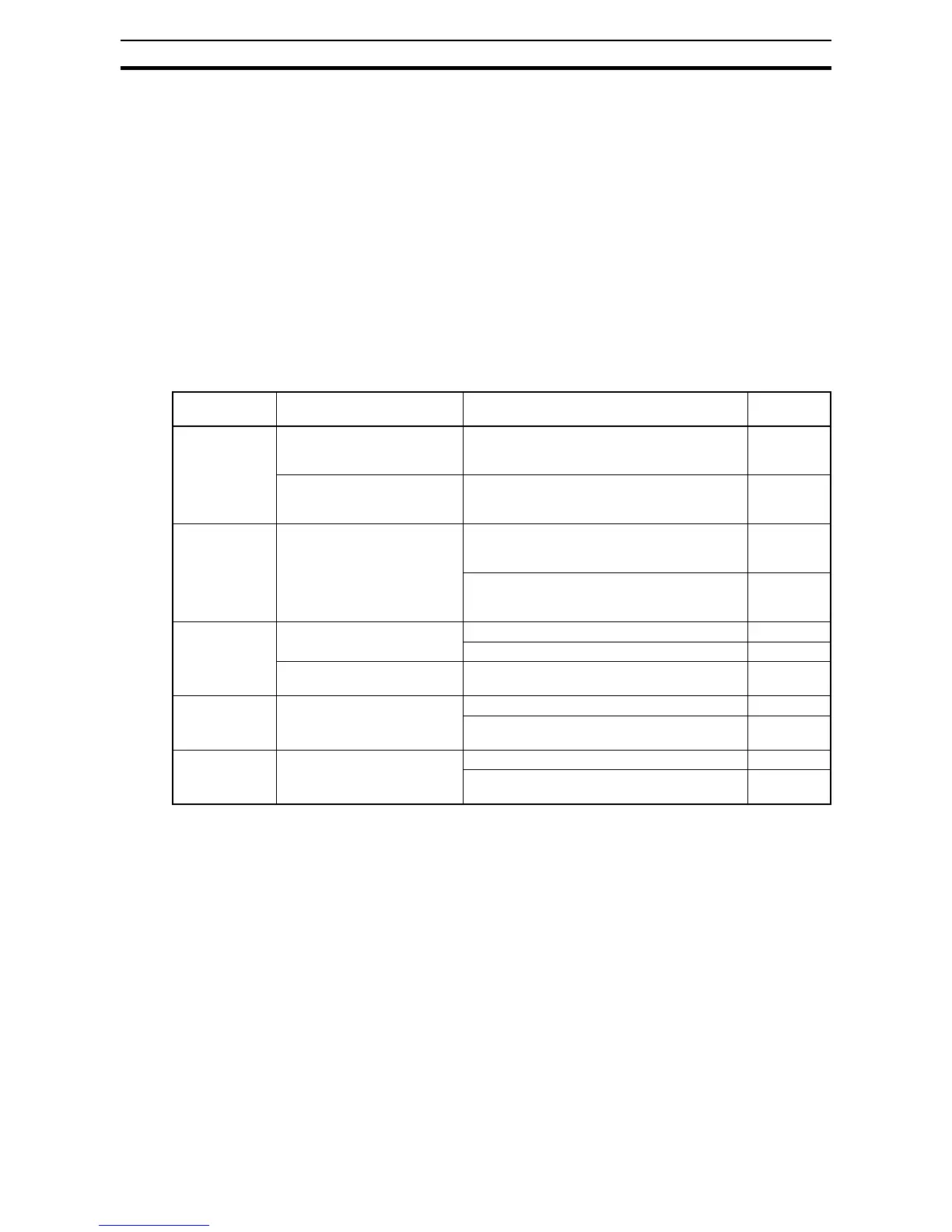
2. If you cannot obtain the desired characteristics from the motor driven un-
der the SLV control, readjust the motor constants according to the symp-
tom, as described in the table below.
Note Note 1) When driving a motor of which the capacity is one class lower than
the inverter, adjust the torque limit (b041 to b044) so that the value "α" calcu-
lated by the expression below does not exceed 200%. Otherwise, the motor
may not be burnt.
α = "torque limit" x (inverter capacity) / (motor capacity)
(Example) When the inverter capacity is 0.75 kW and the motor capacity is
0.4 kW, the torque limit value is calculated as follows, based on the assump-
tion that the value should be 200%:
Torque limit (b041 to b044)= α x (motor capacity) / (inverter capacity)
= 2.0 x (0.4kW)/(0.75kW) = 106%
Status Symptom Adjustment method Adjustment
item
Powering Momentary speed variation is
negative
Increase the motor constant R2 step by step
from the set value up to 1.2 times of the set
value
H021/H221
Momentary speed variation is
positive
Decrease the motor constant R2 step by step
from the set value up to 0.8 times of the set
value
H021/H221
Regeneration Torque is insufficient at low
speed (~ few Hz)
Increase the motor constant R1 step by step
from the set value up to 1.2 times of the set
value
H020/H220
Increase the motor constant Io step by step
from the set value up to 1.2 times of the set
value
H023/H223
Starting Motor generates an impact at
start
Reduce the motor constant J from the set value H024/H224
Decrease the speed response factor H005/H205
Motor runs backward for short
moment at start
Set 01 (enable) on reverse run protection func-
tion (b046)
b046
Decelerating Motor runs unsteadily Decrease the speed response factor H005/H205
Decrease the motor constant J from the set
value
H024/H224
Low frequency
operation
Motor rotation is unstable Increase the speed response factor H024/H224
Increase the motor constant J from the set
value
H005/H205