303
ModBus Data Listing Section B-4
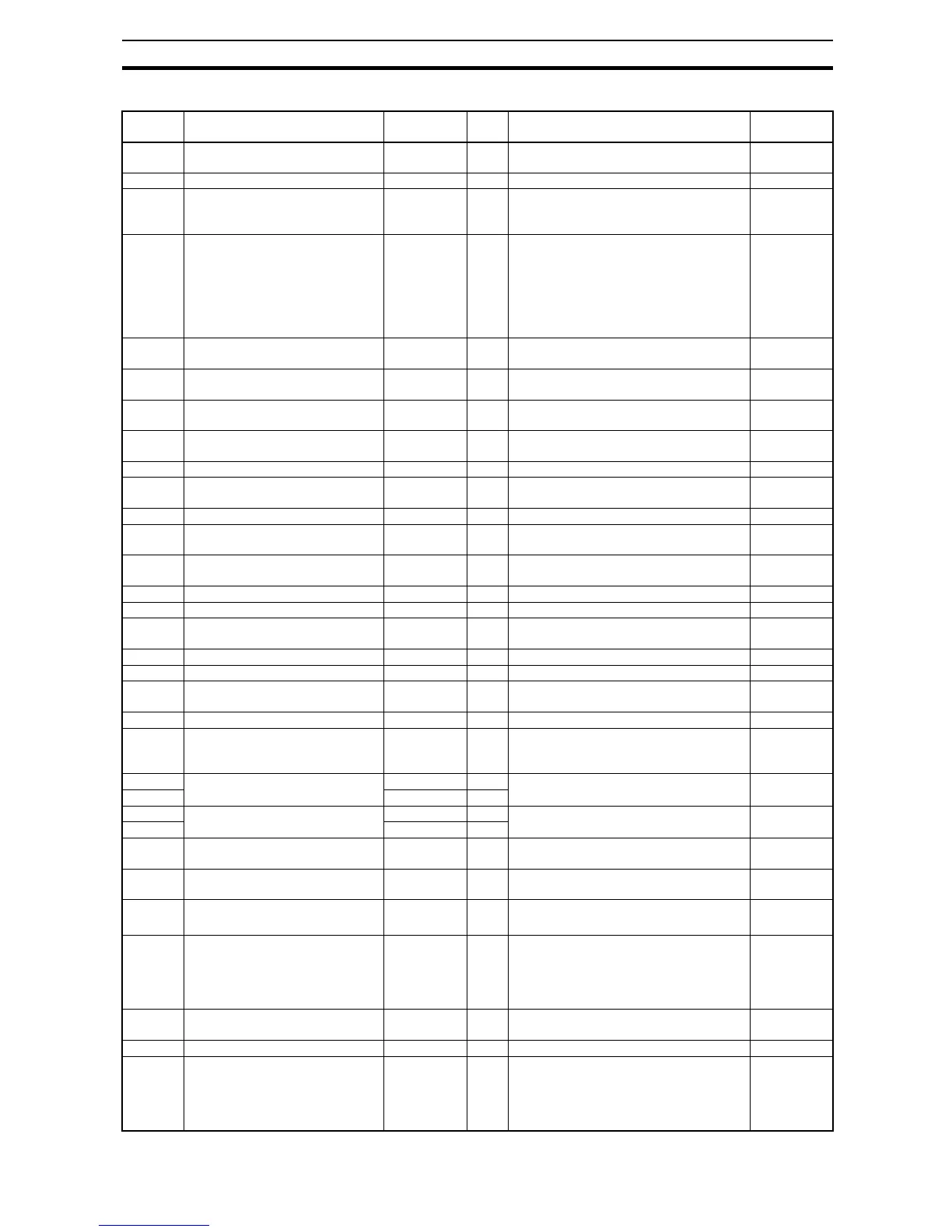
Parameter group P
Register
No.
Function name Function
code
R/W Monitoring and setting items Data
resolution
1601h Operation mode on expansion
card 1 error
P001 R/W 0 (tripping), 1 (continuing operation) –
1602h (Reserved) – – – –
1603h [EA] terminal selection P003 R/W 00 (Speed reference, incl. PID)
01 (Encoder feedback)
02 (Extended terminal for EzSQ)
1604h Pulse train input mode for feed-
back
P004 R/W 00 (Single-phase pulse [EA])
01 (2-phase pulse [90° difference]
1 ([EA] and [EB]))
02 (2-phase pulse [90° difference]
2 ([EA] and [EB]))
03 (Single-phase pulse [EA] and
direction signal [EB])
1605h to
160Ah
(Reserved) – – – –
160Bh Encoder pulse-per-revolution
(PPR) setting
P011 R/W 32 to 1024 1
160Ch Simple positioning selection P012 R/W 00 (simple positioning deactivated)
02 (simple positioning activated)
–
160Dh to
160Eh
(Reserved) – – – –
160Fh Creep speed P015 R/W "start frequency" to 1000 0.01 [Hz]
1610h to
1619h
(Reserved) – – – –
161Ah Over-speed error detection level P026 R/W 0 to 1500 0.1 [%]
161Bh Speed deviation error detection
level
P027 R/W 0 to 12000 0.01 [Hz]
161Ch to
161Eh
(Reserved) – – – –
161Fh Accel/decel time input selection P031 R/W 0 (digital operator), 3 (easy sequence) –
1620h (Reserved) – – – –
1621h Torque command input selection P033 R/W 0 (O terminal), 1 (OI terminal),
3 (digital operator), 06 (Option)
–
1622h Torque command setting P034 R/W 0 to 200 1 [%]
1623h (Reserved) – – – –
1624h Torque bias mode P036 R/W 0 (disabling the mode),1 (digital opera-
tor),
–
1625h Torque bias value P037 R/W -200 to +200 1 [%]
1626h Torque bias polarity selection P038 R/W 0 (as indicated by the sign), 1 (depend-
ing on the operation direction),
05(Option)
–
1627h Speed limit for torque-controlled
operation (forward rotation)
P039 (high) R/W 0 to 12000 0.01 [Hz]
1628h P039 (low) R/W
1629h Speed limit for torque-controlled
operation (reverse rotation)
P040 (high) R/W 0 to 12000 0.01 [Hz]
162Ah P040 (low) R/W
162Bh Speed / torque control switching
time
P041 R/W 0 to 1000 –
162Ch to
162Dh
(Reserved) – – – –
162Eh Communication watchdog timer P044 R/W 0 to 9999 0.01 [sec.]
162Fh Inverter action on communica-
tion error
P045 R/W 0 (tripping), 1 (tripping after decelerating
and stopping the motor), 2 (ignoring
errors), 3 (stopping the motor after free-
running), 4 (decelerating and stopping
the motor)
–
1630h DeviceNet polled I/O: Output
instance number
P046 R/W 0-20 –
1631h (Reserved) – – – –
1632h Inverter action on communica-
tion idle mode
P048 R/W 0 (tripping), 1 (tripping after decelerating
and stopping the motor), 2 (ignoring
errors), 3 (stopping the motor after free-
running), 4 (decelerating and stopping
the motor)
–