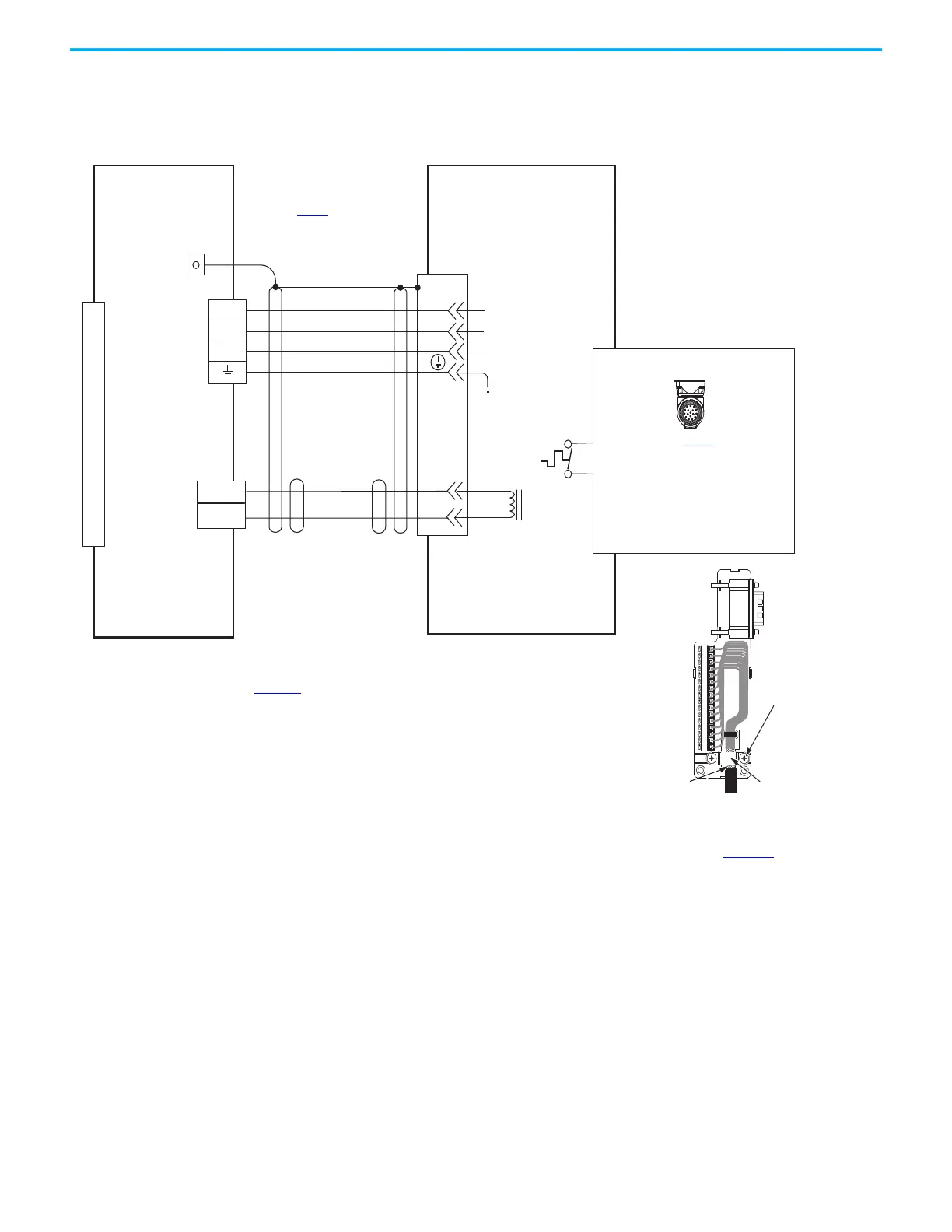
Motor Power
(MP) Connector
MMA-Bxxxxxx-xx
Absolute Encoder Feedback
Universal Feedback
(UFB) Connector
Three-phase
Motor Power
Motor Feedback Connector
Thermostat
See feedback kit illustration for
proper grounding technique.
See table on page 319
for note information.
2090-CFBM7DF-CEAAxx (standard) or
2090-CFBM7DF-CEAFxx (continuous-flex)
(flying-lead) Feedback Cable
Note 19
Note 20
Cable Shield
Clamp
Note 7
See Universal Feedback Connector Kit Installation
Instructions, publication 2198-IN010
, for connector
kit specifications.
Cable Clamp
Exposed shield secured
under clamp.
Clamp Screws (2)
2198-K57CK-D15M
Universal Feedback
Connector Kit
SpeedTec DIN
Feedback Connectors
Grounding Techniques for
Feedback Cable Shield
Motor Brake
Motor Brake
(BC) Connector
2090-CPxM7DF-xxAAxx
(standard) or
2090-CPxM7DF-xxAFxx
(continuous-flex)
Motor Power Cable
Note 19
2198-Sxxx -ERSx
2198-Dxxx -ERSx
Kinetix 5700 Servo Drives
See Table 177.
Encoder / Feedback Designations: See Table 177 for more information:
• L2 = 2048 ppr, TTL Incremental Encoder
• S1 = 1024 sin/cos, Absolute Single-turn Encoder (Hiperface protocol)
• S2 = 1024 sin/cos, Absolute Single-turn Encoder, SIL2/PLd rated (Hiperface protocol)
• S3 = 2048 sin/cos, Absolute Single-turn Encoder (EnDat protocol)
• S4 = 25-bit Absolute Single-turn Digital Encoder EnDat protocol)
• M1 = 1024 sin/cos, Absolute Multi-turn Encoder (Hiperface protocol)
• M2 = 1024 sin/cos, Absolute Multi-turn Encoder SIL2/PLd rated (Hiperface protocol)
• M3 = 2048 sin/cos Absolute Multi-turn Encoder (EnDat protocol)
• M4 = 25-bit Absolute Multi-turn Encoder (EnDat protocol)

 Loading...
Loading...










