TOMATECH AUTOMATION
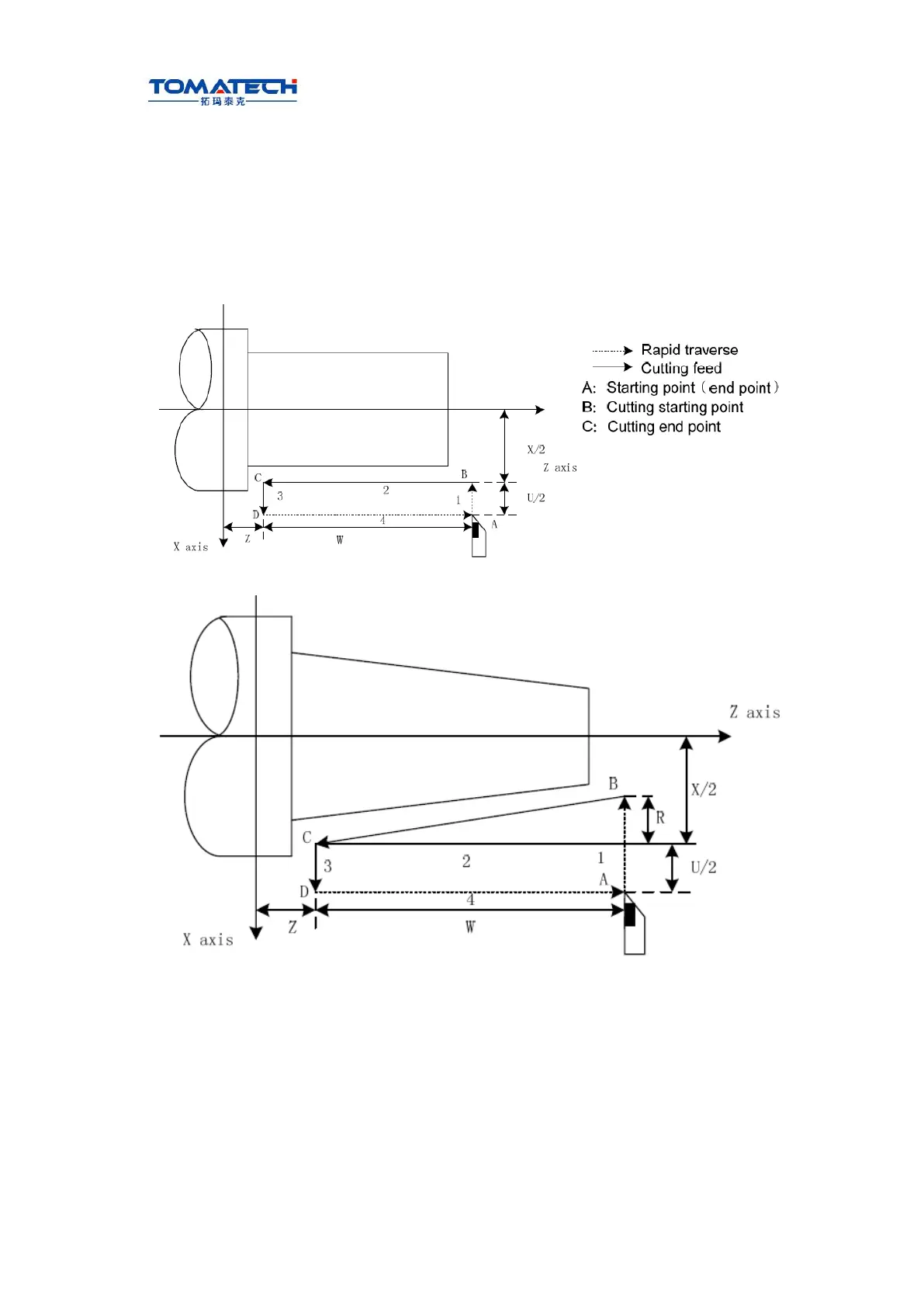
① X rapidly travrses from starting point to cutting starting point;
② Cutting feed (linear interpolation) from the cutting starting point to cutting end point;
③ X executes the tool retraction at feedrate (opposite direction to the above-
mentioned), and return to the position which the absolute coordinates and the starting
point are the same;
④ Z rapidly traverses to return to the starting point and the cycle is completed.
a
Fig. 3-17
Fig. 3-18
Cutting path: Relative position between cutting end point and starting point with U, W, R,
and tool path of U, W, R with different signs are shown in Fig. 3-19: