4. Operation of SEP Related Controllers
196
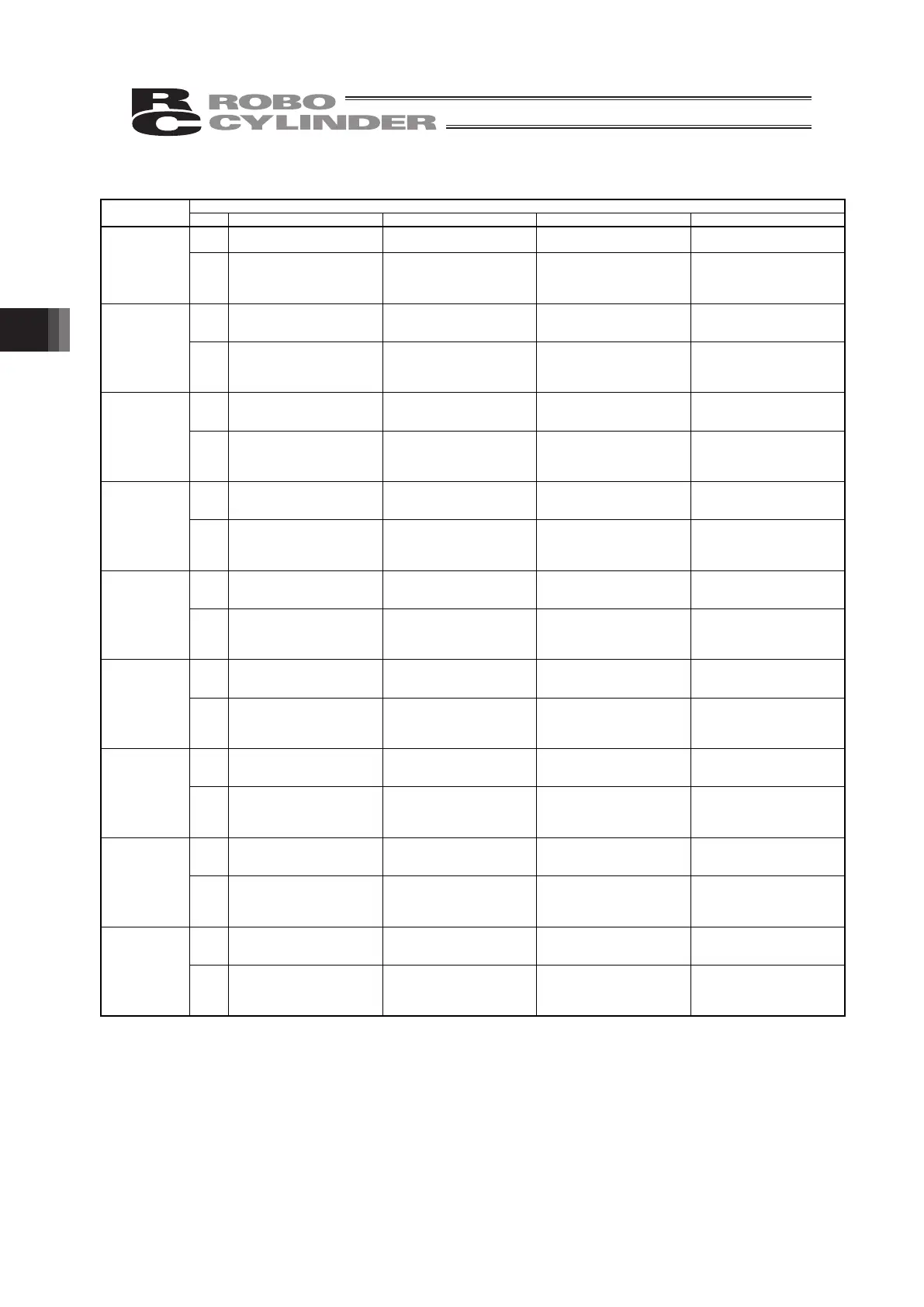
I/O display on monitor screen
PIO pattern
Operation mode
Displayed item
IN3 (input)/OUT3 (output) IN2 (input)/OUT2 (output) IN1 (input)/OUT1 (output) IN0 (input)/OUT0 (output)
Standard
movement
between 2
points: 0
Single
solenoid
Input
-/
SON (servo ON signal) *1
-/
RES (reset signal)
-/
*STP (pause signal)
ST0 (move signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
HEND (home return complete
signal)/
SV (servo ON output signal) *3
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Standard
movement
between 2
points: 0
Double
solenoid
Input
-/
SON (servo ON signal) *1
-/
RES (reset signal)
ST1 (forward end movement
signal)
(-)
ST0 (backward end movement
signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
HEND (home return complete
signal)/
SV (servo ON output signal) *3
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Change travel
speed: 1
Single
solenoid
Input
-/
SON (servo ON signal) *1
SPDC (travel speed switching
signal)
RES (reset signal)
-/
*STP (pause signal)
ST0 (backward end movement
signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
HEND (home return complete
signal)/
SV (servo ON output signal) *3
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Change travel
speed: 1
Double
solenoid
Input
-/
SON (servo ON signal) *1
SPDC (travel speed switching
signal)
RES (reset signal)
ST1 (forward end movement
signal)
(-)
ST0 (backward end movement
signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
HEND (home return complete
signal)/
SV (servo ON output signal) *3
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Position
data change: 2
Single
solenoid
Input
-/
SON (servo ON signal) *1
CN1 (target position switching
signal)
RES (reset signal)
-/
*STP (pause signal)
ST0 (backward end movement
signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
HEND (home return complete
signal)/
SV (servo ON output signal) *3
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Position
data change: 2
Double
solenoid
Input
-/
SON (servo ON signal) *1
CN1 (target position switching
signal)
RES (reset signal)
ST1 (forward end movement
signal)
(-)
ST0 (backward end movement
signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
HEND (home return complete
signal)/
SV (servo ON output signal) *3
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Movement by 2
inputs among 3
points: 3
Input
-/
SON (servo ON signal) *1
-/
RES (reset signal)
-/
ST1 (forward end movement
signal)
ST0 (movement signal 1)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
LS2 (intermediate position
detection signal)/
PE2 (intermediate positioning
complete signal)*2
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Movement by 3
inputs among 3
points: 4
Double
solenoid
Input
-/
SON (servo ON signal) *1
ST2 (position movement 2)
RES (reset signal)
ST1 (forward end movement
signal)
(-)
ST0 (backward end movement
signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
LS2 (intermediate position
detection signal)/
PE2 (intermediate positioning
complete signal)*2
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
Continuous
back-and-forth
operation: 5
Input
-/
SON (servo ON signal) *1
-/
RES (reset signal)
-/
*STP (pause signal)
ASTR (continuous
back-and-forth operation
signal)
Output
*ALM (alarm output signal)/
SV (servo ON output signal) *3
HEND (home return complete
signal)/
SV (servo ON output signal) *3
LS1 (forward end position
detection signal)/
PE1 (forward end positioning
complete signal)*2
LS0 (backward end position
detection signal)/
PE0 (backward positioning
complete signal)*2
The signal name in parentheses indicates the signal state before home return.
*1 If the default I/O setting for servo control is set to “Control”, the SON signal applies.
*2 If the default I/O setting for output signal type is set to “Limit Switch”, LS is applied. If it is set to “Position End”,
PE is applied.
*3 When “SV” is selected by the default I/O setting for output selection. In this case, the SV signal applies.
Either OUT2 or OUT3 can be set depending on the operation parameter and operation mode.
 Loading...
Loading...