3. Operation of CON Related Controllers
86
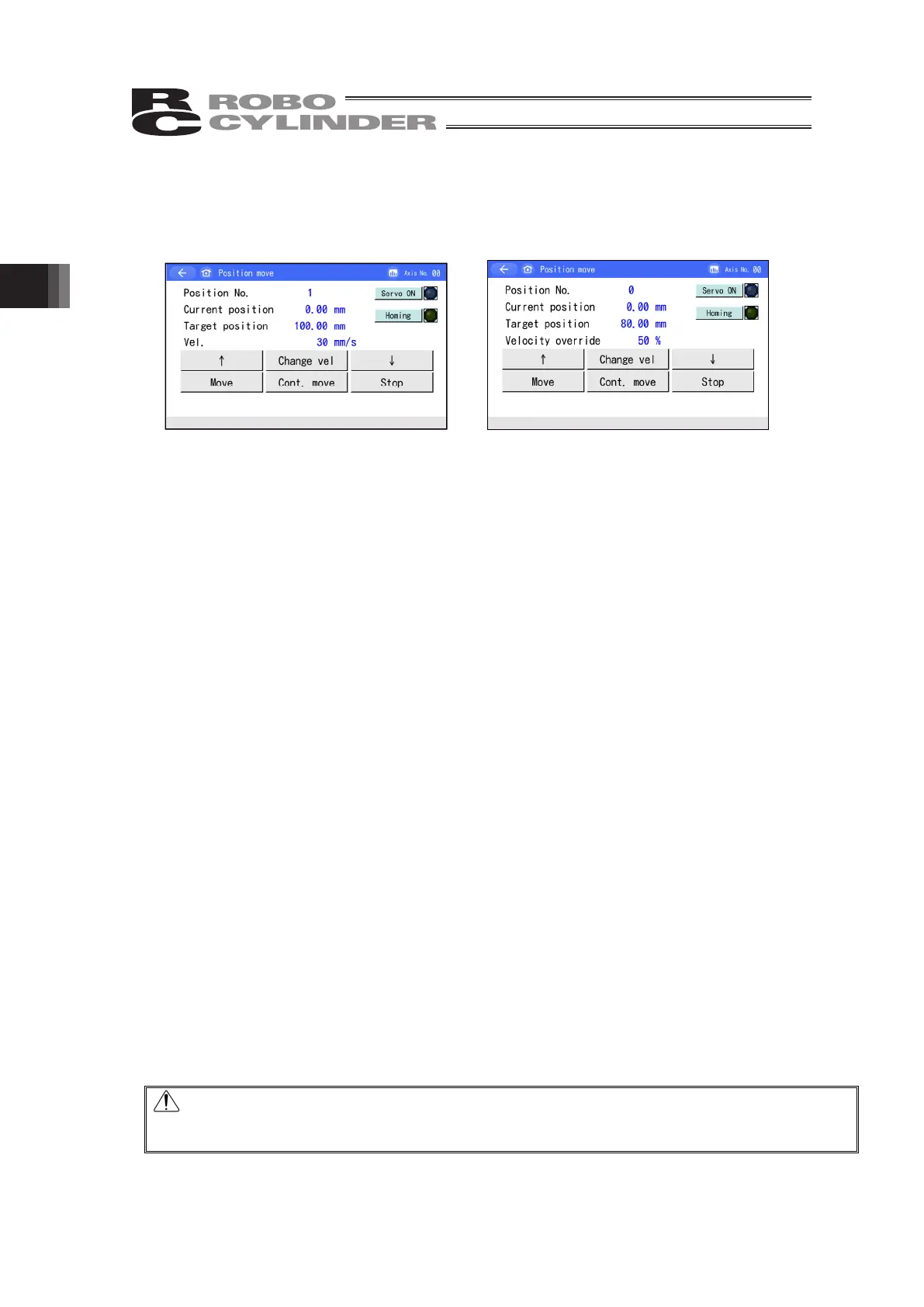
3.12.2 Position Movement Operation
Move to a position or continuously to multiple positions registered in the position table.
The items to be displayed should differ depending on valid/invalid of the safety velocity. [Refer
to 3.13 TP Operation Mode]
When Safety Velocity is Valid When Safety Velocity is Invalid
Position No. : Displays the selected position number.
Current position : Displays the current position.
Target position : Displays the target position set in the selected position number.
When Safety Velocity is Valid;
Vel. : The set velocity (mm/s) should be displayed.
When Safety Velocity is Invalid;
Velocity override : Displays the selected speed override (%).
[Servo ON] : Touching [Servo ON] while the servo is OFF turns on the axis servo
and becomes lit.
Touching [Servo OFF] while the servo is ON turns off the axis servo
and becomes unlit.
[Homing] : Touching [Homing] while home return is not yet completed causes the
axis to return home and becomes lit.
[], [] : Touch [] and [] to select a desired position number.
[Change vel] : When Safety Velocity is Valid
Speed can be changed in order of 1mm/s, 10 mm/s,
30 mm/s, 50 mm/s and 100 mm/s every time touching [Change vel]
: When Safety Velocity is Invalid
Speed override can be changed in order of 10%, 50% and 100%
every time touching [Change vel].
[Move] : Touching [Move] moves the axis to the target position.
[Cont. move] : Touching [Cont. move] moves the axis continuously until Stop is
touched.
[Stop] : Touching [Stop] stops the axis.
Caution: Operation with JOG Switch on Front Panel of RCON
If TB-02 gets disconnected from the controller in the condition that this window is open,
JOG switch operation will get disabled.
 Loading...
Loading...