2056
APPX
Appendix 3 Determining Three PID Constants
Appendix 3 Determining Three PID Constants
The auto tuning function of PID operation instructions is performed in two methods: limit cycle method and step response
method.
Overview of limit cycle method
This section describes the limit cycle method that is a method to determine the amplitude (a) and vibration period (,
on
) of
the input values, and calculate the proportional gain (K
P
), integral time (T
I
), and derivative time (T
D
) according to the following
expression of "Operation characteristics and three constants".
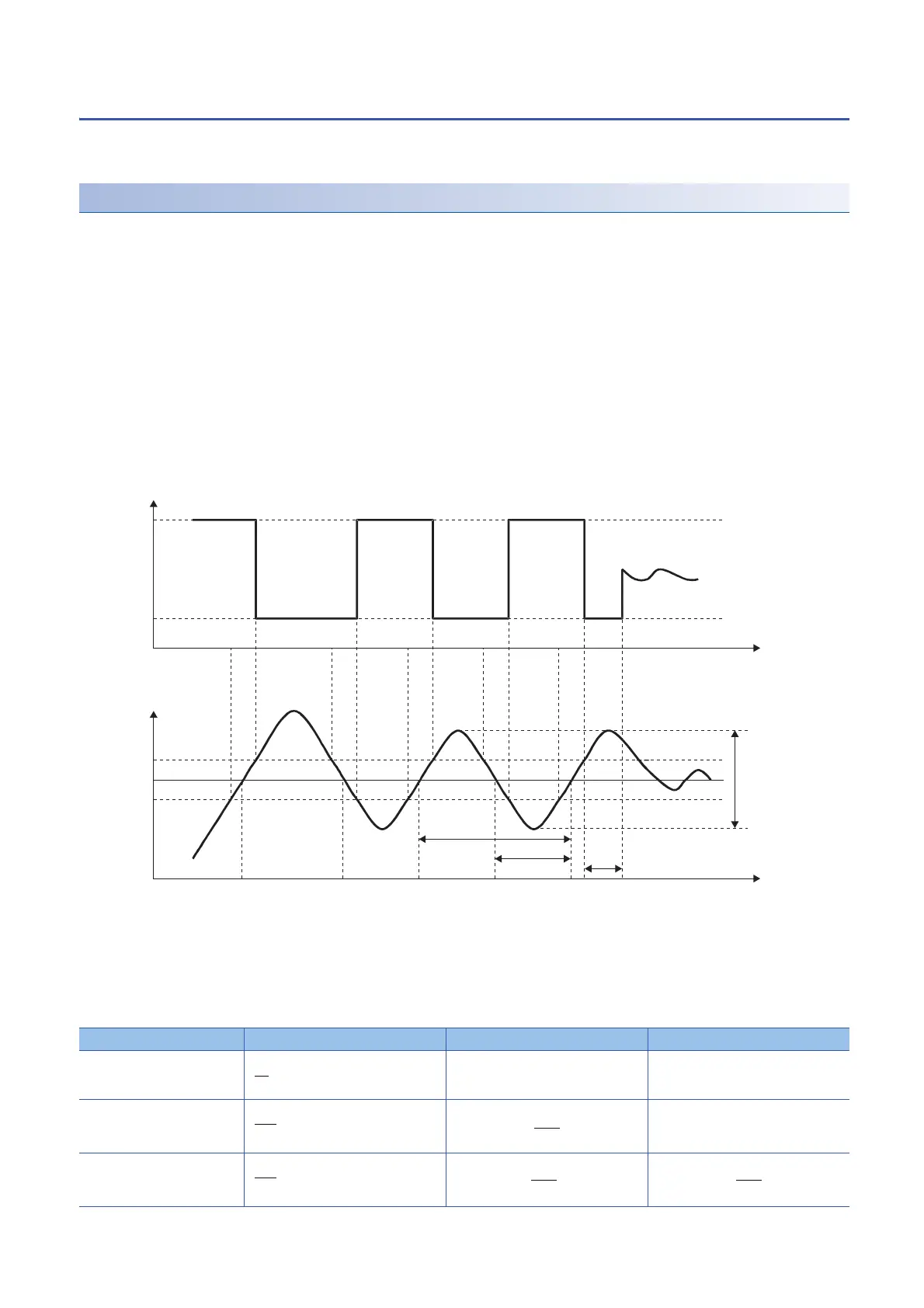
■Limit cycle method
This method determines three PID constants by measuring the variations of input values while two-position control (output by
switching between the output upper limit (ULV) and output lower limit (LLV) according to the deviation) is performed.
■Operation characteristics (reverse action example)
After the end of tuning cycle, the output lower limit (LLV) is retained for the manipulated value (MV) during
W
, and a transition
to the normal PID control occurs.
W
can be determined by (50+K
W
)/100 (-
on
), and the wait setting parameter (K
W
) can be set in parameter (s3)+28.
(Setting range K
W
= -50 to 32717 [%]; If an abnormal range is specified, operation is performed assuming
W
= 0.)
■Operation characteristics and three constants
ULV: Output upper limit value
LLV: Output lower limit value
SV: Set value
t: Time
SHPV: PV value threshold (hysteresis) width
Control method Proportional gain (K
P
) [%] Integral time (T
I
) [100ms] Derivative time (T
D
) [10ms]
Proportional control (P action)
only
PI control (PI action)
PID control (PID action)
τ0 τ1 τ2
τon
τw
τ
a
MV
t
t
ULV
LLV
SV
SV+SHPV
SV-SHPV
Input value
a
0.9
(ULV-LLV) × 100

 Loading...
Loading...














