3 Servomotor Specifications and Dimensional Drawings
3.13.2 SGMPH Servomotors (3000 min
-1
) With Brakes
3-68
3.13.2 SGMPH Servomotors (3000 min
-1
) With Brakes
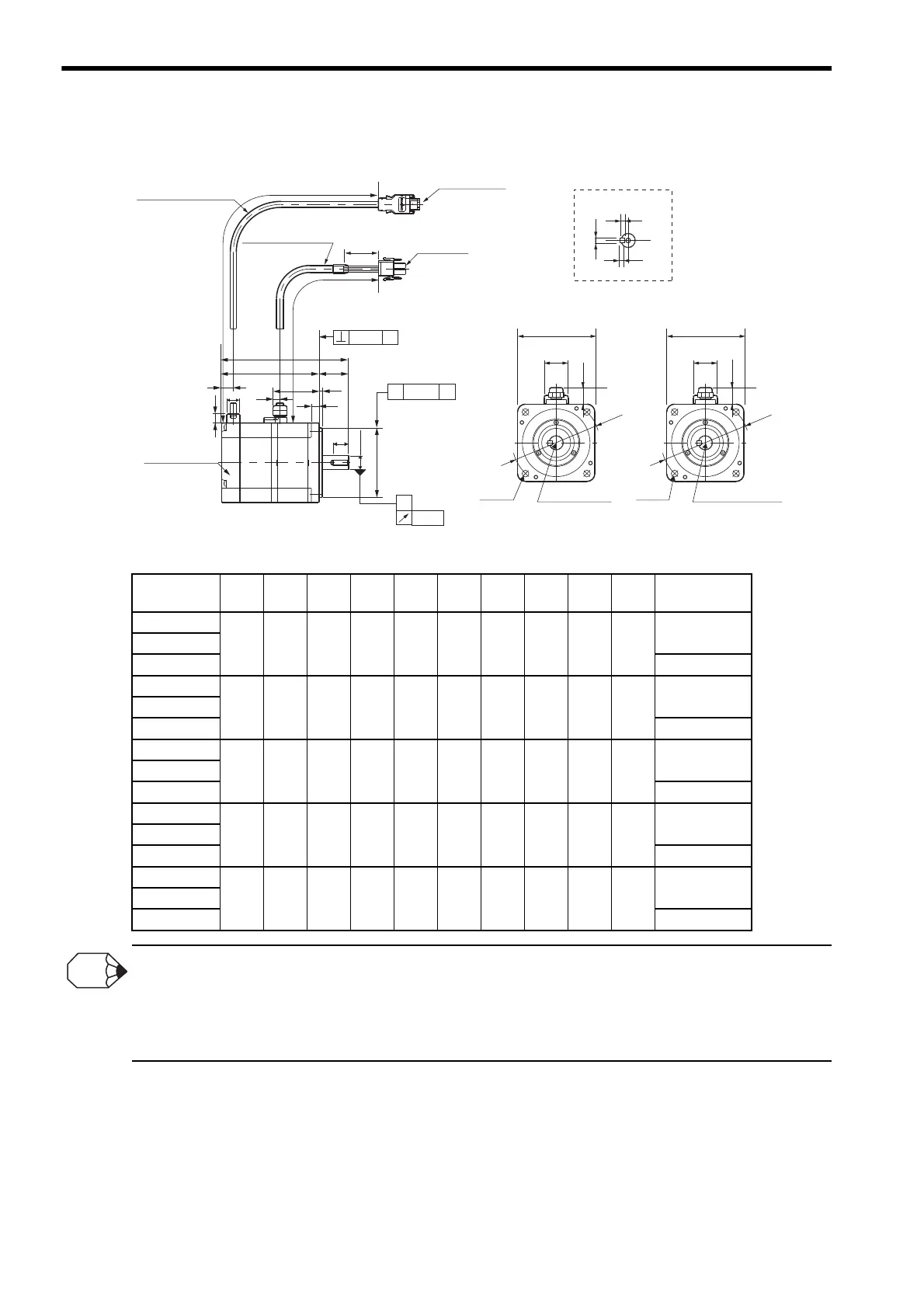
1. The dimensions for L and LL of a servomotor incorporating an encoder with super-capacitor (model: SGMPH-4)
are as shown below.
SGMPH-01, 02, and 04: L-dimension + 6.4 mm, LL-dimension +6.4 mm
SGMPH-08 and 15: L-dimension + 6.0 mm, LL-dimension +6.0 mm
2. The working point of the SGMPH servomotor radial load is at the position of minus 5 mm from the shaft end.
Units: mm
Model
SGMPH-
LLLLMLRLELGLFSLBLH
Tap×
Depth
012
116 91 42.5 25 3 6 12.5 8 50 10.55
No tap
014
016
M3
×6L
022
128.5 98.5 48.1 30 3 8 11.9 14 70 8.25
No tap
024
026
M5
×8L
042
148.5 118.5 68.1 30 3 8 11.9 14 70 8.25
No tap
044
046
M5×8L
082
160 120 66.7 40 3.5 10 12.8 16 110 10.5
No tap
084
086
M5
×8L
152
188 148 94.7 40 3.5 10 12.8 19 110 10.5
No tap
154
156
M6
×10L
Shaft End
U
T
W
LC
21
18
Dimensions of SGMPH-01 to 04 Dimensions of SGMPH-08 and -15
Tap × Depth
(See the following
table.)
4-φL㨆
φLA
LC
38
28
φLA
Tap × Depth
(See the following
table.)
4-φL㨆
QK
LELM
LL LR
LG
LH
LF
9.5
Encoder plug
Motor plug
Encoder cable φ6
UL20276
Motor cable φ7
300 ±30
(35)
φSh6
φ
LBh7
A
0.02
L
A0.04
٧ Aφ0.04
Serial encoder
13
300 ±30

 Loading...
Loading...






