4 SERVOPACK Specifications and Dimensional Drawings
4.1.3 SERVOPACK Ratings and Specifications
4-4
4.1.3 SERVOPACK Ratings and Specifications
Basic
Specifi-
cations
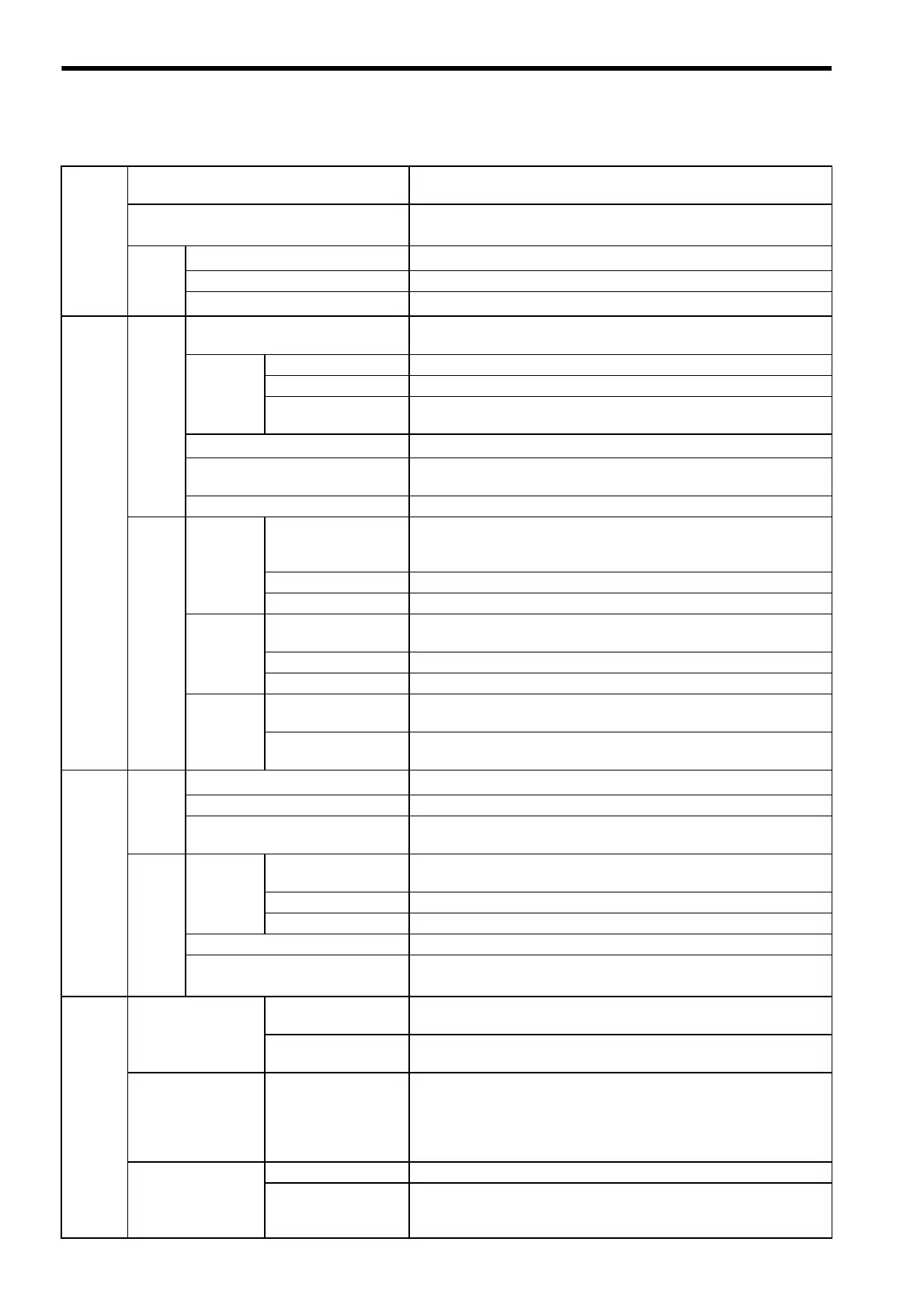
Control Method
Single or three-phase full-wave rectification IGBT-PWM (sine-wave
driven)
Feedback
Serial encoder: 13, 16 or 17-bit (incremental/absolute)
∗
The 13-bit encoder is incremental only.
Condi-
tions
Ambient/Storage Temperature
∗1
0 to +55 °C/-20 to +85 °C
Ambient/Storage Humidity 90% RH or less (with no condensation)
Vibration/Shock Resistance
4.9 m/s
2
/19.6 m/s
2
Speed
and
Tor que
Control
Modes
Perfor-
mance
Speed Control Range
1:5000 (The lowest speed of the speed control range is the speed at which
the servomotor will not stop with a rated torque load.)
Speed
Regula-
tion
∗2
Load Regulation 0 to 100% load: ±0.01% or less (at rated speed)
Voltage Regulation Rated voltage ±10%: 0% (at rated speed)
Temperature Regula-
tion
25 ± 25 °C: ±0.1% or less (at rated speed)
Frequency Characteristics
400 Hz (at J
L
= J
M
)
Torque Control Tolerance
(Repeatability)
±2%
Soft Start Time Setting 0 to 10 s (Can be set individually for acceleration and deceleration.)
Input
Signals
Speed
Reference
Input
Reference Voltage
∗3
±6 VDC (Variable setting range: ±2 to ±10 VDC) at rated torque (servo-
motor forward rotation with positive reference), input voltage: maximum
±12 V
Input Impedance About 14 kΩ
Circuit Time Constant About 47 μs
Torque
Reference
Input
Reference Voltage
∗3
±3 VDC (Variable setting range: ±1 to ±10 VDC) at rated torque (positive
torque reference with positive reference), input voltage: maximum ±12 V
Input Impedance About 14 kΩ
Circuit Time Constant About 47 μs
Contact
Speed
Reference
Rotation Direction
Selection
With P control signal
Speed Selection
With forward/reverse current limit signal (speed 1 to 3 selection), servo-
motor stops or another control method is used when both are OFF.
Position
Control
Modes
Perfor-
mance
Bias Setting
0 to 450 min
-1
(setting resolution: 1 min
-1
)
Feed Forward Compensation 0 to 100% (setting resolution: 1%)
Positioning Completed Width
Setting
0 to 250 reference units (setting resolution: 1 reference unit)
Input
Signals
Reference
Pulse
Type
Sign + pulse train, 90° phase difference 2-phase pulse (phase A + phase
B), or CCW + CW pulse train
Form Line driver (+5 V level), open collector (+5 V or +12 V level)
Frequency Maximum 500/200 kpps (line driver/open collector)
Control Signal Clear signal (input pulse form identical to reference pulse)
Built-in Open Collector Power
Supply
∗4
+12 V (1kΩ resistor built in)
I/O
Signals
Position Output
Form
Phase-A, -B, -C line driver
Phase-S line driver (only with an absolute encoder)
Frequency Dividing
Ratio
Any
Sequence Input
Signal allocation can
be modified.
Servo ON, P control (or Control mode switching, forward/reverse motor
rotation by internal speed setting, zero clamping, reference pulse prohib-
ited), forward run prohibited (P-OT), reverse run prohibited (N-OT),
alarm reset, forward current limit, and reverse current limit (or internal
speed selection)
Sequence Output
Fixed Output Servo alarm, 3-bit alarm codes
Signal allocation can
be modified.
Positioning completed (speed coincidence), during servomotor rotation,
servo ready, during current limiting, during speed limiting, brake
released, warning, selecting three of the NEAR signals.

 Loading...
Loading...






