10 Upgraded Versions
10.5.6 Troubleshooting
10-22
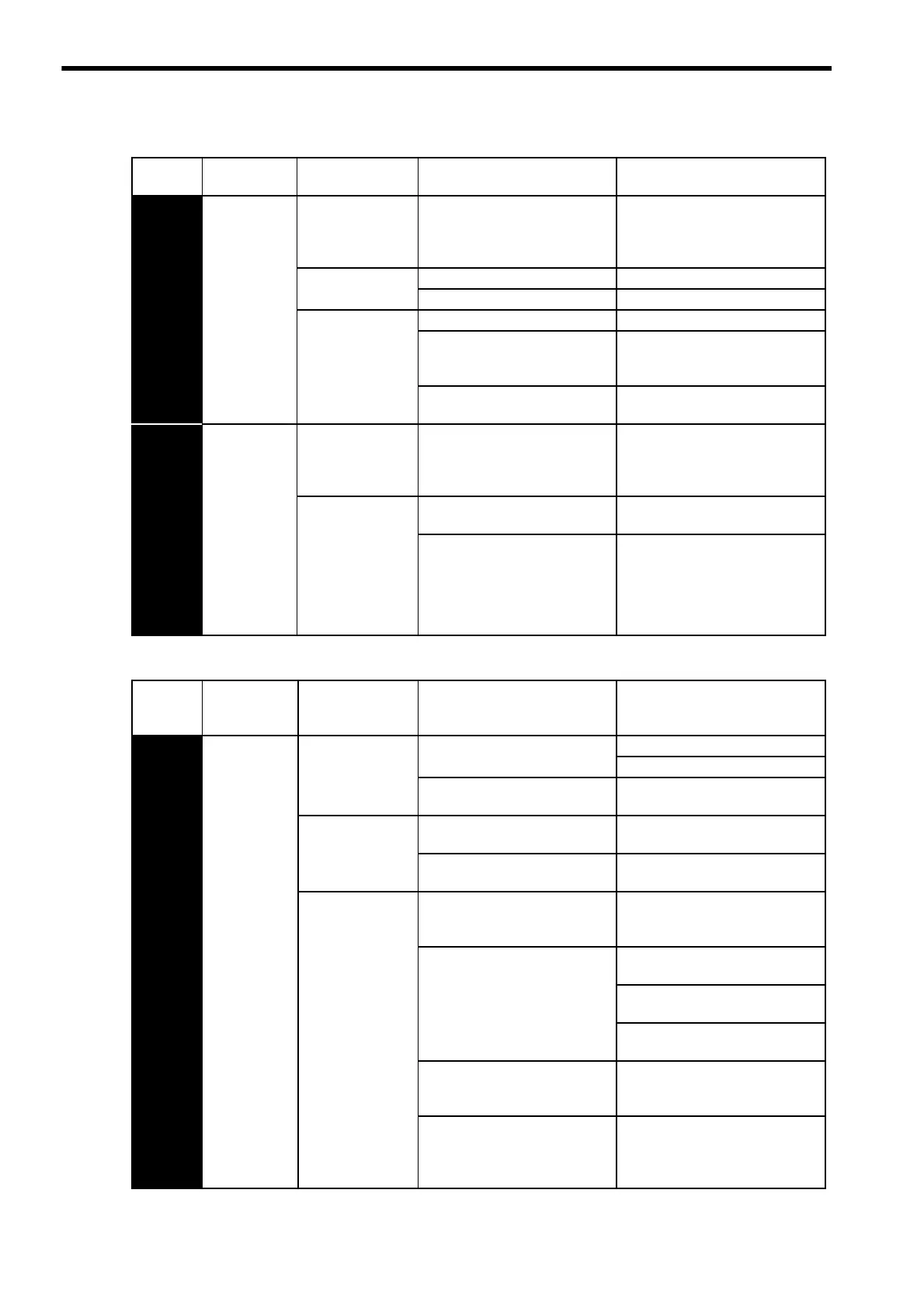
(b) Warning List
A.b3 Current
Detection
Error
Occurred when the
control power sup-
ply was turned
ON.
The current sensor is faulty. Replace the SERVOPACK.
Occurred when the
servo was ON.
The current sensor is faulty. Replace the SERVOPACK.
The servomotor is disconnected. Correct the servomotor wiring.
Occurred during
normal operation.
The current sensor is faulty. Replace the SERVOPACK.
The Servo ON command was
input while the servomotor was
operating.
Check to be sure the servomotor
has stopped, and then input the
Servo ON command.
The servomotor was discon-
nected.
Correct the servomotor wiring.
A.F5
A.F6
Servomotor
Disconnec-
tion Alarm
The power is
not supplied
to the servo-
motor though
the SERVO-
PACK
received the
Servo ON
command.
Occurred when the
control power sup-
ply was turned
ON.
A SERVOPACK board fault
occurred.
Replace the SERVOPACK.
Occurred when the
servo was ON.
A SERVOPACK board fault
occurred.
Replace the SERVOPACK.
The Servomotor was disconnect. Correct the servomotor wiring.
Warning
Display
Warning
Name
Situation at
Warning
Occurrence
Cause Corrective Actions
A.90 Excessive
Position Error
Warning:
Warning for
the alarm
A.d0
(In servo ON
status, the
position error
pulses exceed
the excessive
position error
warning level
set in the
parameter
Pn51E.)
Occurred at the
servomotor high-
speed rotation.
The contact in the servomotor U,
V, and W wirings is faulty.
Correct the servomotor wiring.
Correct the encoder wiring.
A SERVOPACK board fault
occurred.
Replace the SERVOPACK.
The servomotor
did not run with
position reference
input.
The contact in the servomotor U,
V, and W wirings is faulty.
Correct the servomotor wiring.
A SERVOPACK board fault
occurred.
Replace the SERVOPACK.
Normal move-
ment, but occurred
with a long dis-
tance reference
input.
The SERVOPACK gain adjust-
ment is improper.
Increase the speed loop gain
(Pn100) and position loop gain
(Pn102).
The position reference pulse fre-
quency is too high.
Adjust slowly the position refer-
ence pulse frequency.
Apply the smoothing function
(Pn204 or Pn205).
Correct the electronic gear ratio
(Pn202, Pn203).
Setting of the position error
pulse over flow warning level
(Pn51E) is incorrect.
Set the parameter Pn51E to proper
value.
The servomotor specifications
do not meet the load conditions
such as torque and moment of
inertia.
Reconsider and correct the load
and servomotor capacity.
(Cont’d)
Alarm
Display
Alarm Name
Situation at Alarm
Occurrence
Cause Corrective Actions

 Loading...
Loading...






