3 Servomotor Specifications and Dimensional Drawings
3.5.1 SGMSH Servomotors (3000 min
-1
) Without Gears
3-28
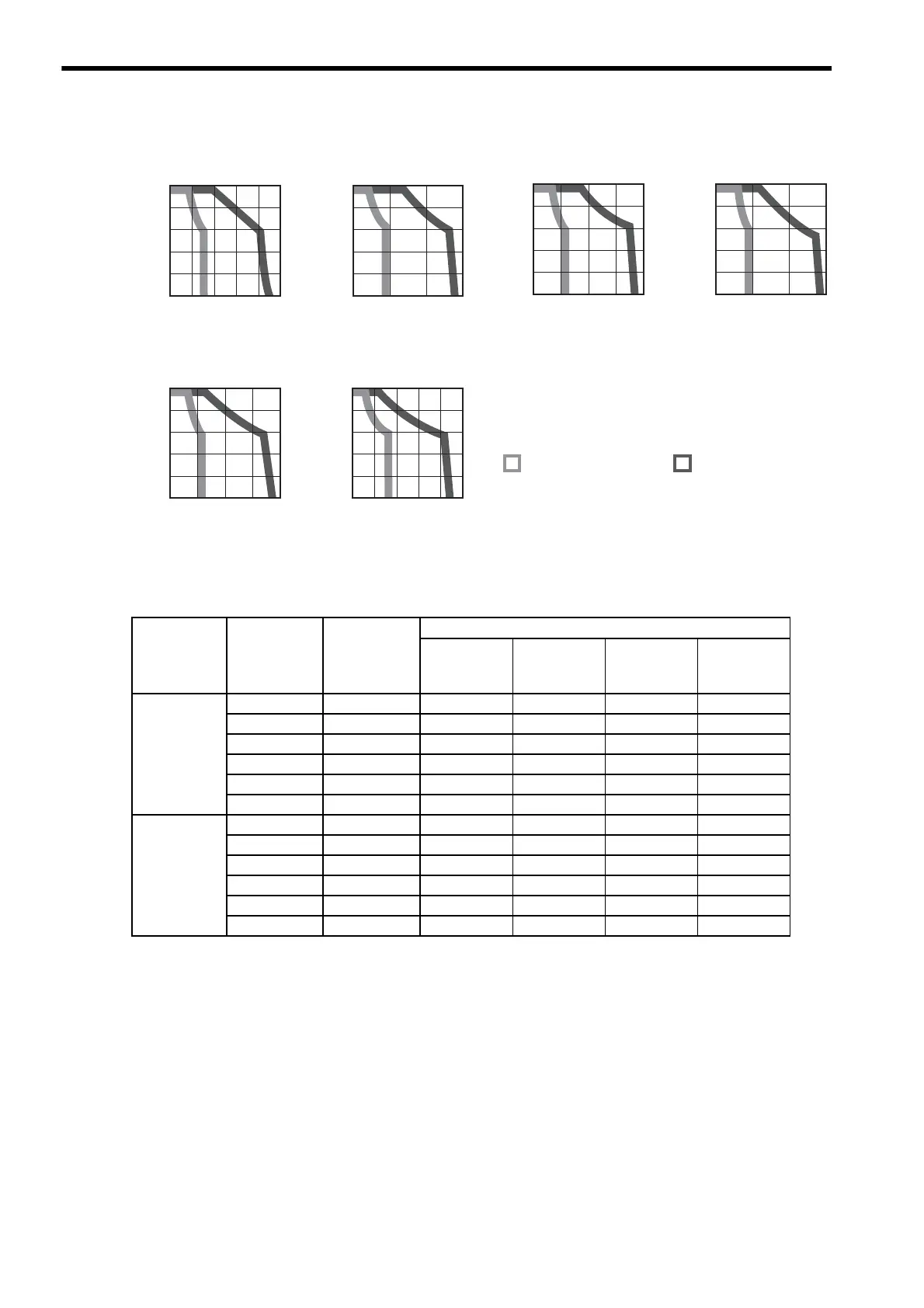
(3) Torque-motor Speed Characteristics
(4) Holding Brake Electrical Specifications
Note: The holding brake is only used to hold the load and cannot be used to stop the servomotor.
SGMSH-10AغA
0
3000
2000
1000
4000
5000
3000
2000
1000
4000
5000
024 6810
AB
SGMSH-20AغA
0
3000
2000
1000
4000
5000
3000
2000
1000
4000
5000
0 5 10 15 20
AB
SGMSH-15AغA
0
0 5 10 15
AB
SGMSH-30AغA
0
0102030
AB
SGMSH-40AغA
0
3000
2000
1000
4000
5000
010203040
AB
SGMSH-50AغA
Torque (Nm)
(min
-1
)
(min
-1
)
(min
-1
)
(min
-1
)
(min
-1
)
(min
-1
)
Torque (Nm)
Torque (Nm)
Torque (Nm)
Torque (Nm)Torque (Nm)
A
B
: Continuous Duty Zone
: Intermittent Duty Zone
Motor
speed
Motor
speed
Motor
speed
Motor
speed
Motor
speed
Motor
speed
3000
2000
1000
4000
5000
0
01020 5030 40
AB
Holding
Brake Rated
Voltage
Servomotor
Model
Servomotor
Capacity
W
Holding Brake Specifications
Capacity
W
Holding
Tor q ue
N·m
Coil
Resistance
Ω (at 20 °C)
Rated
Current
A (at 20 °C)
90 VDC
SGMSH-10 1000 12 7.84 675 0.13
SGMSH-15 1500 12 7.84 675 0.13
SGMSH-20 2000 12 7.84 675 0.13
SGMSH-30 3000 10.1 20.0 804 0.11
SGMSH-40 4000 10.1 20.0 804 0.11
SGMSH-50 5000 10.1 20.0 804 0.11
24 VDC
SGMSH-10 1000 12 7.84 48 0.5
SGMSH-15 1500 12 7.84 48 0.5
SGMSH-20 2000 12 7.84 48 0.5
SGMSH-30 3000 9.85 20.0 58.7 0.41
SGMSH-40 4000 9.85 20.0 58.7 0.41
SGMSH-50 5000 9.85 20.0 58.7 0.41

 Loading...
Loading...






