n
L6-03/L6-06: Torque Detection Time 1/2
No. Name Setting Range Default Page
L6-01 Torque Detection Selection 1
0: Disabled
1: OL3 at Speed Agree - Alarm (Overtorque Detection only active during Speed Agree and
Operation continues after detection).
2: OL3 at RUN - Alarm (Overtorque Detection is always active and operation continues after
detection).
3: OL3 at Speed Agree - Fault (Overtorque Detection only active during Speed Agree and drive
output will shut down on an OL3 fault).
4: OL3 at RUN - Fault (Overtorque Detection is always active and drive output will shut down
on an OL3 fault).
5: UL3 at Speed Agree - Alarm (Undertorque Detection is only active during Speed Agree and
operation continues after detection).
6: UL3 at RUN - Alarm (Undertorque Detection is always active and operation continues after
detection).
7: UL3 at Speed Agree - Fault (Undertorque Detection only active during Speed Agree and
drive output will shut down on an OL3 fault).
8: UL3 at RUN - Fault (Undertorque Detection is always active and drive output will shut down
on an OL3 fault).
0 −
L6-02 Torque Detection Level 1 0 to 300 150% −
L6-03 Torque Detection Time 1 0.0 to 10.0 0.1 s −
L6-04 Torque Detection Selection 2 Same as L6-01 0 −
L6-05 Torque Detection Level 2 0 to 300 150% −
L6-06 Torque Detection Time 2 0.0 to 10.0 0.1 s −
Detailed Description
This function is used to detect torque levels in order to check for overtorque or undertorque. When enabled, the following selection can be assigned to
the multi-function output terminals (H2-01, H2-02, and H2-03).
Setting Status Description
B Closed Output current/torque exceeds the torque value set in parameter L6-02 for longer than the time specified in parameter L6-03.
17 Open Output current/torque exceeds the value set in parameter L6-02 for more time than is set in parameter L6-03.
18 Closed Output current/torque exceeds the value set in parameter L6-05 for more time than is set in parameter L6-06.
19 Open Output current/torque exceeds the value set in parameter L6-05 for more time than is set in parameter L6-06
Note: The torque detection function uses a hysteresis of about 10% of the drive rated output current. The torque detection level in V/f Control is 100% of the drive rated output
current. In Open Loop Vector, it is defined as 100% of the motor rated torque.
NOTICE: When overtorque occurs, the drive may stop due to overcurrent or overload (OL1). To prevent this, the drive should quickly detect overtorque situations. Problems with
undertorque can result in a torn belt, a pump shutting off, or other similar trouble.
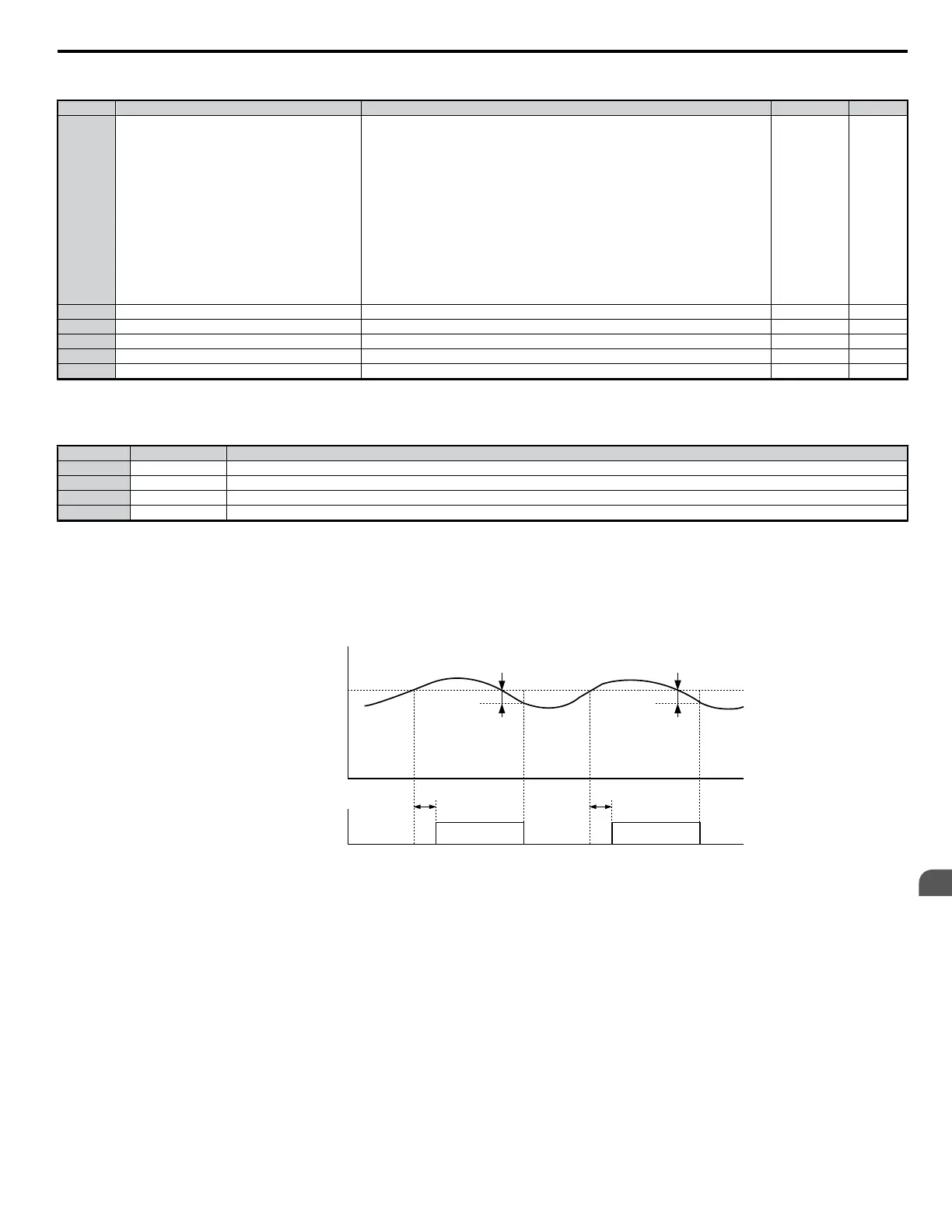
Below is a timechart for overtorque and undertorque detection.
• Overtorque Detection
*
*
L6-02
or
L6-05
Torque Detection 1 (N.O.)
or
Torque Detection 2 (N.O.)
Motor Current (output torque)
L6-03
or
L6-06
L6-03
or
L6-06
ON ON
Note: Torque detection is not active in about 10% of the drive rated output current (or motor rated torque).
5.8 L: Protection Functions
YASKAWA ELECTRIC SIEP C710606 18A YASKAWA AC Drive – V1000 Technical Manual (Preliminary)
197
5
Parameter Details

 Loading...
Loading...










