3. Operation of CON Related Controllers
94
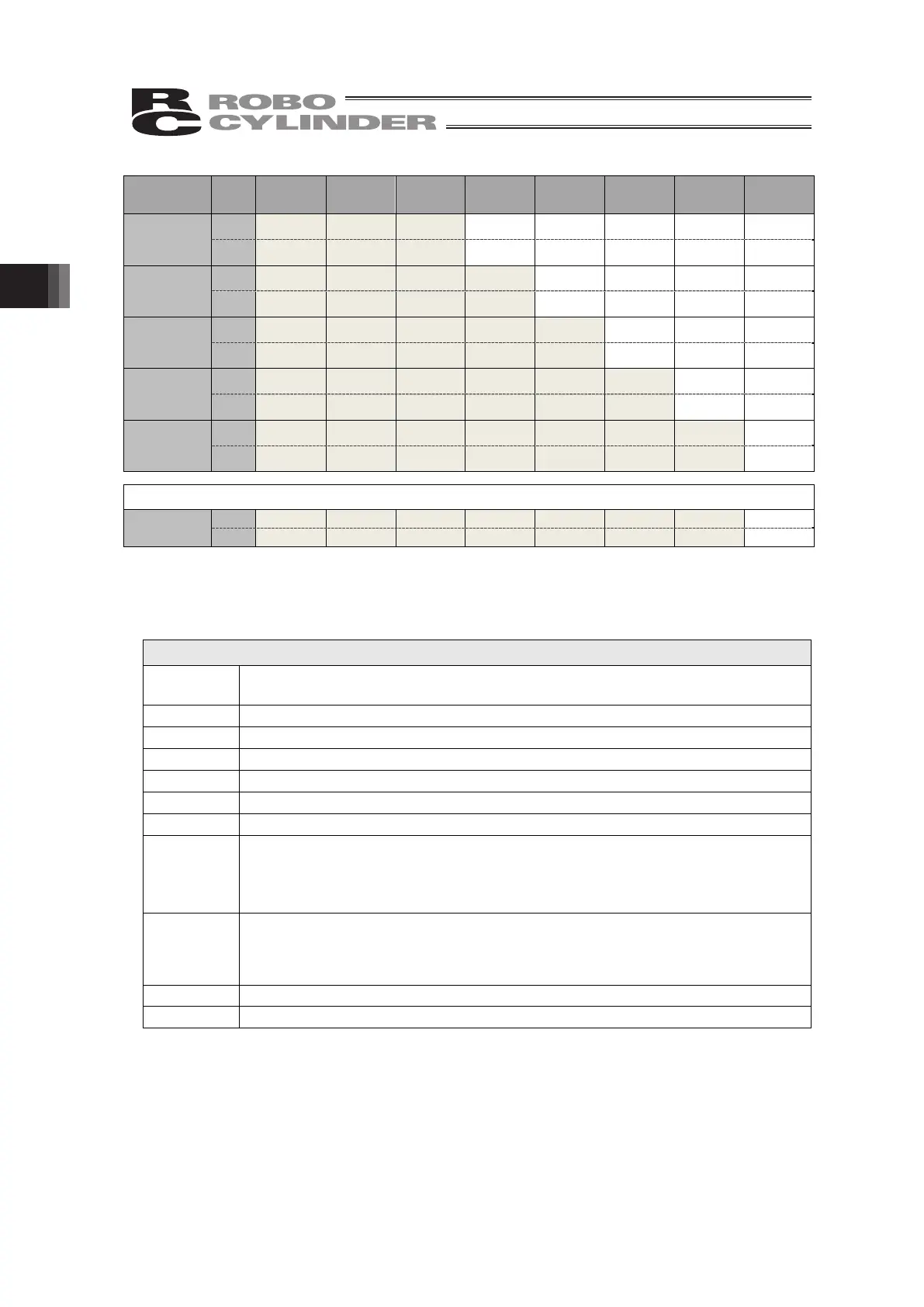
Number of
positioning
points
IN/
OUT
IN/OUT 0 IN/OUT 1 IN/OUT 2 IN/OUT 3 IN/OUT4 IN/OUT5 IN/OUT 6 IN/OUT 7
4 points
IN PC1 PC2 CSTR
Available for
Assignment
Available for
Assignment
Available for
Assignment
Available for
Assignment
Available for
Assignment
OUT PM1 PM2 PEND
Available for
Assignment
Available for
Assignment
Available for
Assignment
Available for
Assignment
Available for
Assignment
8 points
IN PC1 PC2 PC4 CSTR
Available for
Assignment
Available for
Assignment
Available for
Assignment
Available for
Assignment
OUT PM1 PM2 PM4 PEND
Available for
Assignment
Available for
Assignment
Available for
Assignment
Available for
Assignment
16 points
IN PC1 PC2 PC4 PC8 CSTR
Available for
Assignment
Available for
Assignment
Available for
Assignment
OUT PM1 PM2 PM4 PM8 PEND
Available for
Assignment
Available for
Assignment
Available for
Assignment
32 points
IN PC1 PC2 PC4 PC8 PC16 CSTR
Available for
Assignment
Available for
Assignment
OUT PM1 PM2 PM4 PM8 PM16 PEND
Available for
Assignment
Available for
Assignment
64 points
IN PC1 PC2 PC4 PC8 PC16 PC32 CSTR
Available for
Assignment
OUT
PM1 PM2 PM4 PM8 PM16 PM32 PEND
Available for
Assignment
Initial Assignment at Delivery
64 点
IN
PC1 PC2 PC4 PC8 PC16 PC32 CSTR RES
OUT
PM1 PM2 PM4 PM8 PM16 PM32 PEND *ALM
■Signals Available for Assignment
Any signal in the list of signals below can be selected.
For the detail of each signal, please refer to the instruction manual of each controller.
Input
Signal
name
Content
NC
-
Feature not assi
ned
* STP Release of pause : Pause command when OFF
SON Servo ON command : Servo turned on when ON
HOME Home returnc : Home-return command when ON
RES Rese
: Reset executed when ON
JISL Jo
/inchin
switchin
: JOG operation when OF
, Inchin
operation when ON
JVEL
Jog-speed/inch-distance switching:
Parameter No. 26 “JOG Velocity” and Parameter No. 48 “Inching Distance” are
used when it is off and Parameter No. 47 “JOG Velocity 2” and Parameter No. 49
“Inchin
Distance 2” when it is on.
JOG+/JOG-
Jog : JOG+ : Movement to direction opposite home when ON
JOG- : Movement to direction of home when ON
* The direction of movement should be the other way around of the
reversed type.
RMOD Operation mode :
UTO Mode when OF
, MANU Mode when ON
BKRL Brake release : Brake Released when ON
 Loading...
Loading...