3. Operation of CON Related Controllers
162
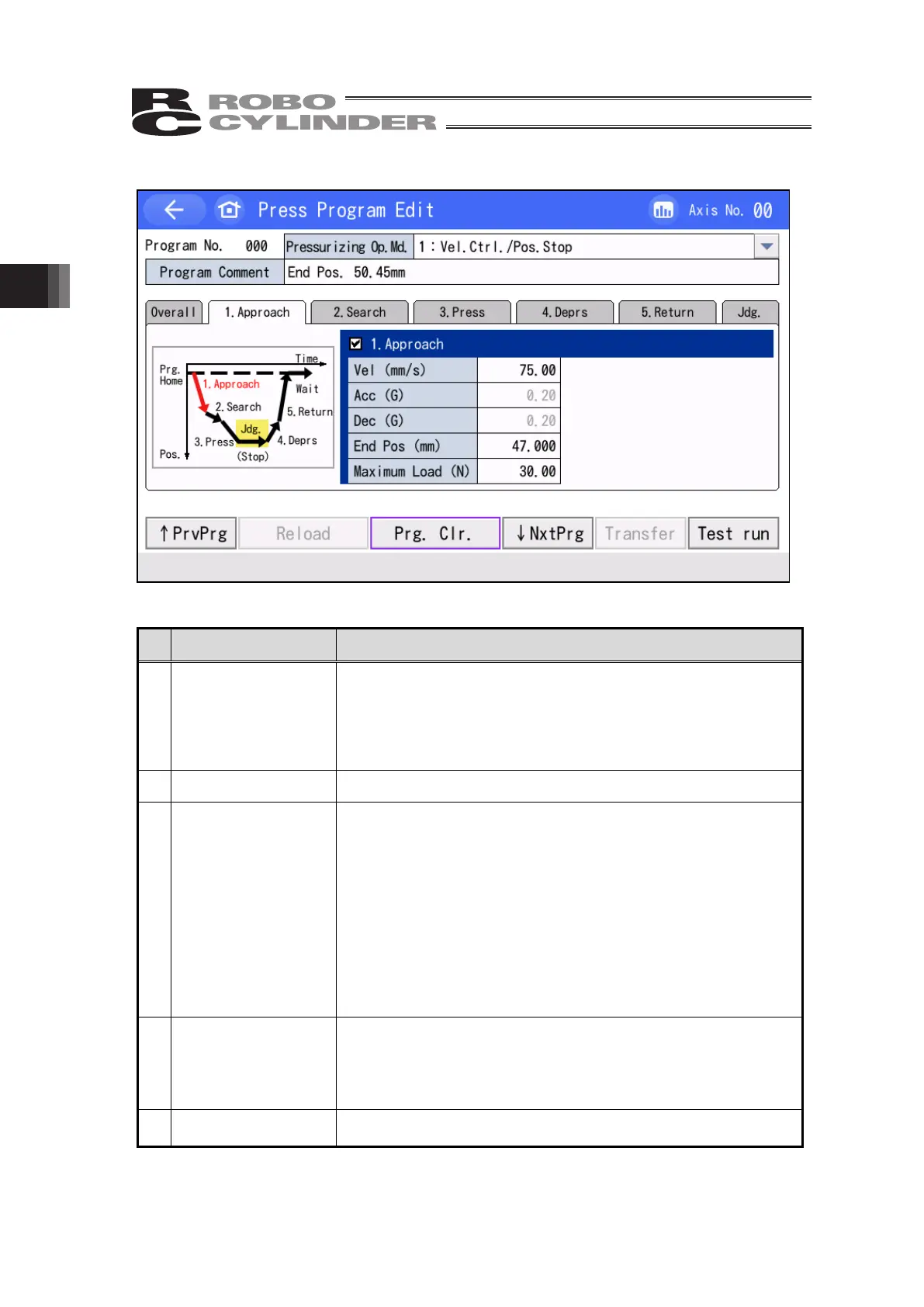
(2) Approach : Touch [1. Approach] tab.
Press Program Select Screen [1. Approach] tab Setting List
Name Explanations
1)
Approaching Valid /
Invalid
Setting should be established whether to perform the
approaching operation.
Put a check mark to activate it.
Remove a check mark to make it invalid, and input of velocity,
acceleration, deceleration, complete position and maximum load
will become unavailable.
2) Vel (mm/s) Velocity of the approaching operation can be input.
3)
Acc (G)
Dec (G)
Acceleration and deceleration of the approaching operation can
be input.
The setting should basically be made within the range of the
rated value stated in the catalog.
A greater number than the rated value stated in the catalog may
be able to be selected for the input range, however, it is for the
case assuming “the purpose to shorten the takt time in the case
that the transported weight is much lighter than the rated value”.
Decrease the value if a problem could be caused by vibration on
transported object during acceleration and deceleration.
If the acceleration and deceleration lump-sum setting is valid,
input cannot be made.
4) End Pos (mm)
A positon to complete the approaching operation can be input.
Input should be made for the complete position to make it
“Approaching Complete Position < Searching Limit Position” and
“Approaching Complete Position ≦ Pressurizing Complete
Position”.
5) Maximum Load (N)
The allowable value for the load in the approaching operation can
be input.
1
2
3
4
5
 Loading...
Loading...