Issue 01/06 Parameter Description
MICROMASTER 440 Parameter List
6SE6400-5BB00-0BP0
183
r1725 CO: Integral limit of Isd ctrl. Min: -
Datatype: Float Unit: V Def: -
P-Group: CONTROL Max: -
Displays limit of integral output voltage setpoint of Isd current controller.
r1728 CO: Decoupling voltage Min: -
Datatype: Float Unit: V Def: -
P-Group: CONTROL Max: -
Displays actual output voltage setpoint of cross channel decoupling.
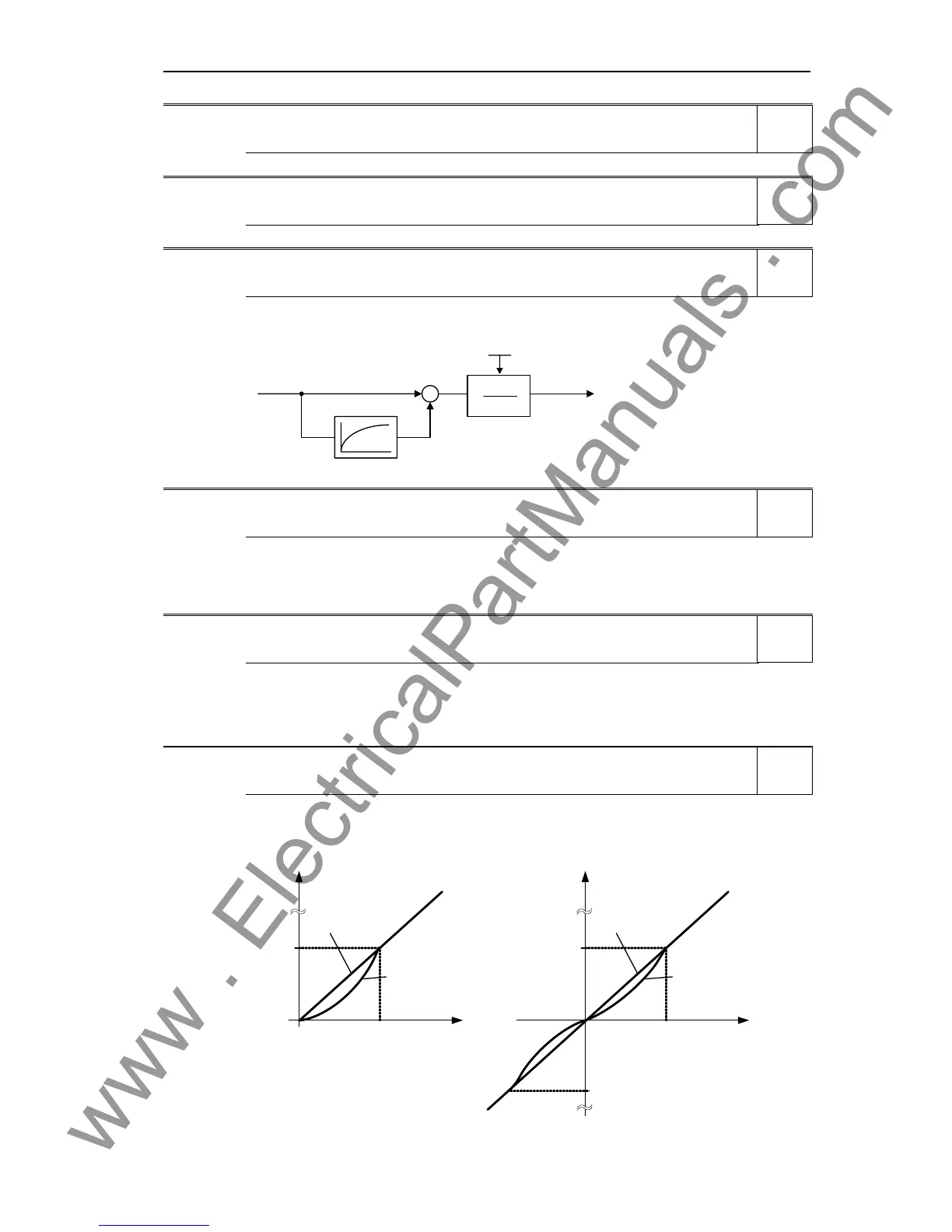
P1740 Gain for oscillation damping Min: 0.000
CStat: CUT Datatype: Float Unit: - Def: 0.000
P-Group: CONTROL Active: Immediately QuickComm.: No Max: 10.000
Sets the controller gain to dampen oscillations in the sensorless vector control (SLVC) at low frequencies
(open-loop).
P1740
T
1740P
fi
sq
-
res damping
Dependency:
Siehe P1750, P1755, P1756
P1745[3] Variance flux error Min: 0.0
CStat: CUT Datatype: Float Unit: % Def: 5.0
P-Group: CONTROL Active: Immediately QuickComm.: No Max: 1000.0
Allowed variance error between flux setpoint and measured flux.
Index:
P1745[0] : 1st. Drive data set (DDS)
P1745[1] : 2nd. Drive data set (DDS)
P1745[2] : 3rd. Drive data set (DDS)
r1746 CO: Variance flux error Min: -
Datatype: Float Unit: % Def: -
P-Group: CONTROL Max: -
Variance error between flux setpoint and measured flux.
3.29.2.9 Motor model
P1750[3] Control word of motor model Min: 0
CStat: CUT Datatype: U16 Unit: - Def: 0
P-Group: CONTROL Active: first confirm QuickComm.: No Max: 3
Control word of motor model. This parameter controls the operation of the sensorless vector control (SLVC)
at very low frequencies. This therefore includes the following conditions:
- Operation directly after an ON command
- zero crossing.
f
t
P1755
Closed loop
Open loop
Start
f
t
Closed loop
Open loop
Zero crossing
P1755
P1755
Level
4
Level
4
Level
3
Level
3
Level
3
Level
3

 Loading...
Loading...










