Issue 01/06 Function Diagrams
MICROMASTER 440 Parameter List
6SE6400-5BB00-0BP0
291
- 5100 -
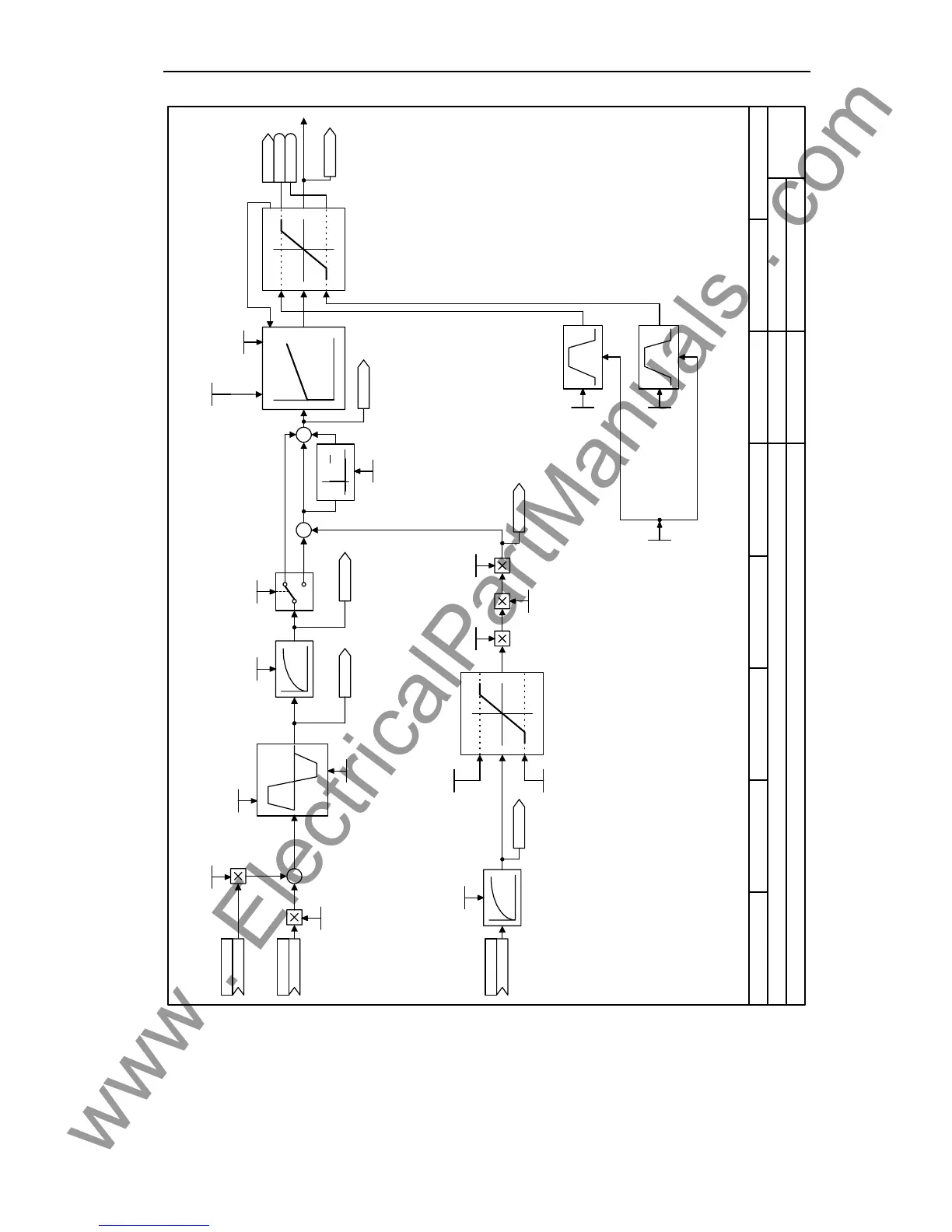
Function diagram
87654321
5100_PID.vsd
Setpoint Channel
MICROMASTER 440
16.01.2006 V2.1
PID controller
Kp Tn
x
y
+
+
x
y
PID trim gain fact
0.00 ... 100.00
P2256 (100.00)
PID setp.gain fact
0.00 ... 100.00
P2255 (100.00)
PID setp. ramp-up
0.00 ... 650.00 [s]
P2257 (1.00)
PID setp. ramp-dwn
0.00 ... 650.00 [s]
P2258 (1.00)
r2260
CO: PID setp <-RFG
PID setp.filt.Tcon
0.00 ... 60.00 [s]
P2261 (0.00)
Fdbck.filt. Tconst
0.00 ... 60.00 [s]
P2265 (0.00)
PID fdbck max. val
-200.00 ... 200.00 [%]
P2267 (100.00)
PID fdbck min. val
-200.00 ... 200.00 [%]
P2268 (0.00)
PID feedback gain
0.00 ... 500.00
P2269 (100.00)
PID trans. type
0 ... 1
P2271 (0)
PID fdbck fnct sel
0 ... 3
P2270 (0)
r2273
CO: PID error
PID prop. gain
0.000 ... 65.000
P2280 (3.000)
PID integral time
0.000 ... 60.000 [s]
P2285 (0.000)
PID outp.upper lim
-200.00 ... 200.00 [%]
P2291 (100.00)
PID outp.lower lim
-200.00 ... 200.00 [%]
P2292 (0.00)
PID lim. ramp time
0.00 ... 100.00 [s]
P2293 (1.00)
r2294
CO: Act.PID output
r2266
CO: PID filt.fdbck [%]
CI: PID feedback
(755:0)
P2264.C
CI:PID trim source
(0:0)
P2254.C
CI: PID setpoint
(0:0)
P2253.C
+
-
d
dt
+
+
PID deriv. time
0.000 ... 60.000 [s]
P2274 (0.000)
PID ctrl. type
0 ... 1
P2263 (0)
P2200 = BI: Enable PID controller
P2251 = PID mode (0 = PID as setpoint, 1 = PID as trim)
P2350 = PID autotune enable
P2354 = PID tuning timeout length
P2355 = PID tuning offset
0
1
r2262
CO: Filt. PID setp
r2272
CO: PID scal fdbck [%]
CO/BO: Act StatWd2
r0053
r0053
r0053
.11
.10
+

 Loading...
Loading...










