Issue 01/06 Parameter Description
MICROMASTER 440 Parameter List
6SE6400-5BB00-0BP0
237
P2274 PID derivative time Min: 0.000
CStat: CUT Datatype: Float Unit: s Def: 0.000
P-Group: TECH Active: Immediately QuickComm.: No Max: 60.000
Sets PID derivative time.
P2274 = 0:
The derivative term does not have any effect (it applies a gain of 1).
P2280 PID proportional gain Min: 0.000
CStat: CUT Datatype: Float Unit: - Def: 3.000
P-Group: TECH Active: Immediately QuickComm.: No Max: 65.000
Allows user to set proportional gain for PID controller.
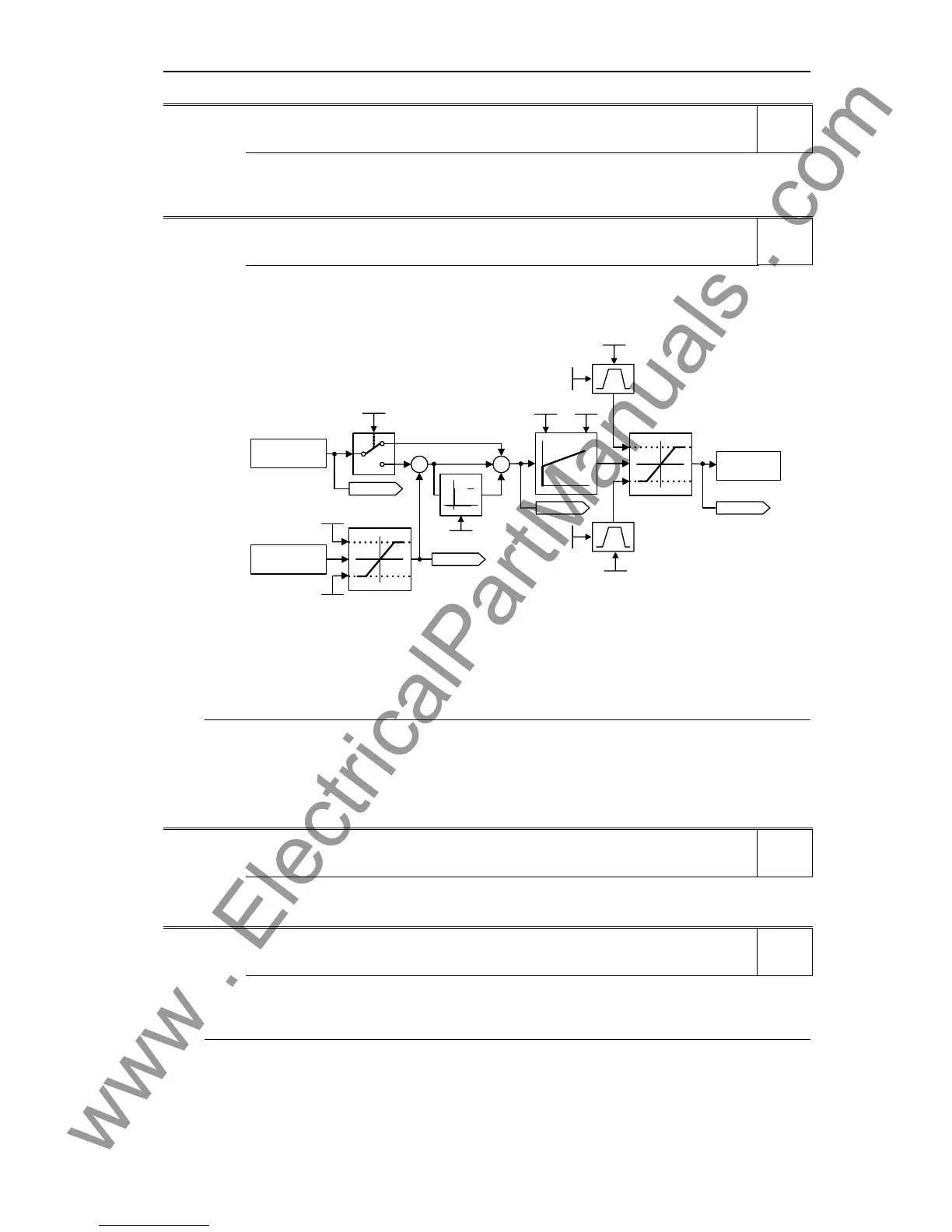
The PID controller is implemented using the standard model.
+
-
d
dt
+
0
1
P2263
r2262
r2272
Kp Tn
P2285P2280
r2273
Motor
control
x
y
P2291
P2274
P2293
P2292
r2294
PID
setpoint
PID
feedback
x
y
P2267
P2268
+
+
P2293
For best results, enable both P and I terms.
Dependency:
P2280 = 0 (P term of PID = 0):
I term acts on the square of the error signal.
P2285 = 0 (I term of PID = 0):
PID controller acts as a P or PD controller respectively.
Note:
- If the system is prone to sudden step changes in the feedback signal, P term should normally be set to
a small value (0.5) with a faster I term for optimum performance.
- The D term (P2274) multiplies the difference between the present and previous feedback signal thus
accelerating the controller reaction to an error that appears suddenly.
- The D term should be used carefully, since it can cause the controller output to fluctuate as every
change in the feedback signal is amplified by the controller derivative action.
P2285 PID integral time Min: 0.000
CStat: CUT Datatype: Float Unit: s Def: 0.000
P-Group: TECH Active: Immediately QuickComm.: No Max: 60.000
Sets integral time constant for PID controller.
Details:
See P2280 (PID proportional gain).
P2291 PID output upper limit Min: -200.00
CStat: CUT Datatype: Float Unit: % Def: 100.00
P-Group: TECH Active: Immediately QuickComm.: No Max: 200.00
Sets upper limit for PID controller output in [%].
Dependency:
If F max (P1082) is greater than P2000 (reference frequency), either P2000 or P2291 (PID output upper
limit) must be changed to achieve F max.
Note:
P2291 = 100 % corresponds to 4000 hex (as defined by P2000 (reference frequency)).
Level
2
Level
2
Level
2
Level
2

 Loading...
Loading...










