Parameters Issue 01/06
MICROMASTER 440 Parameter List
24 6SE6400-5BB00-0BP0
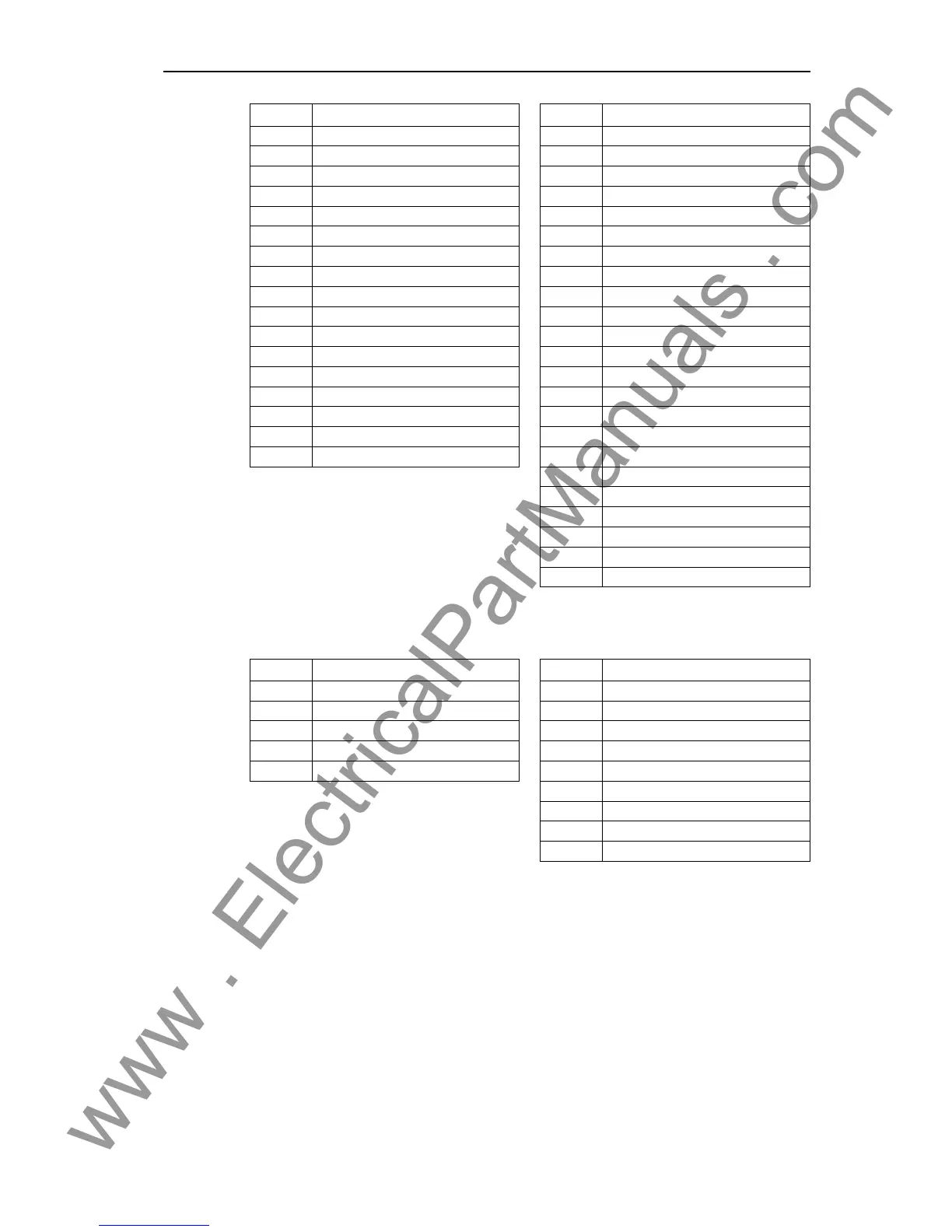
ParNo Parameter text
r1597 CO: Outp. field weak. controller
r1598 CO: Flux setpoint (total)
r1718 CO: Output of Isq controller
r1719 CO: Integral output of Isq ctrl.
r1723 CO: Output of Isd controller
r1724 CO: Integral output of Isd ctrl.
r1725 CO: Integral limit of Isd ctrl.
r1728 CO: Decoupling voltage
r1770 CO: Prop. output of n-adaption
r1746 CO: Flussabweichung
r1771 CO: Int. output of n-adaption
r1778 CO: Flux angle difference
r1801 CO: Act. pulse frequency
r2015[8] CO: PZD from BOP link (USS)
r2018[8] CO: PZD from COM link (USS)
ParNo Parameter text
r2050[8] CO: PZD from CB
r2169 CO: Act. filtered frequency
r2224 CO: Act. fixed PID setpoint
r2250 CO: Output setpoint of PID-MOP
r2260 CO: PID setpoint after PID-RFG
r2262 CO: Filtered PID setp. after RFG
r2266 CO: PID filtered feedback
r2272 CO: PID scaled feedback
r2273 CO: PID error
r2294 CO: Act. PID output
r2870 CO: ADD 1
r2872 CO: ADD 2
r2874 CO: SUB 1
r2876 CO: SUB 2
r2878 CO: MUL 1
r2880 CO: MUL 2
r2882 CO: DIV 1
r2884 CO: DIV 2
P2889 CO: Fixed setpoint 1 in [%]
P2890 CO: Fixed setpoint 2 in [%]
2.8 Connector/Binector Output Parameters
ParNo Parameter text
r0019 CO/BO: BOP control word
r0052 CO/BO: Act. status word 1
r0053 CO/BO: Act. status word 2
r0054 CO/BO: Act. control word 1
r0055 CO/BO: Act. control word 2
ParNo Parameter text
r0056 CO/BO: Status of motor control
r0403 CO/BO: Encoder status word
r0722 CO/BO: Binary input values
r0747 CO/BO: State of digital outputs
r0785 CO/BO: Zustand Analogausgang
r1407 CO/BO: Status 2 of motor control
r2197 CO/BO: Monitoring word 1
r2198 CO/BO: Monitoring word 2

 Loading...
Loading...










