Communication processor and Modbus TCP
13.4 Universal serial interface (USS) communication
S7-1200 Programmable controller
System Manual, V4.2, 09/2016, A5E02486680-AK
1157
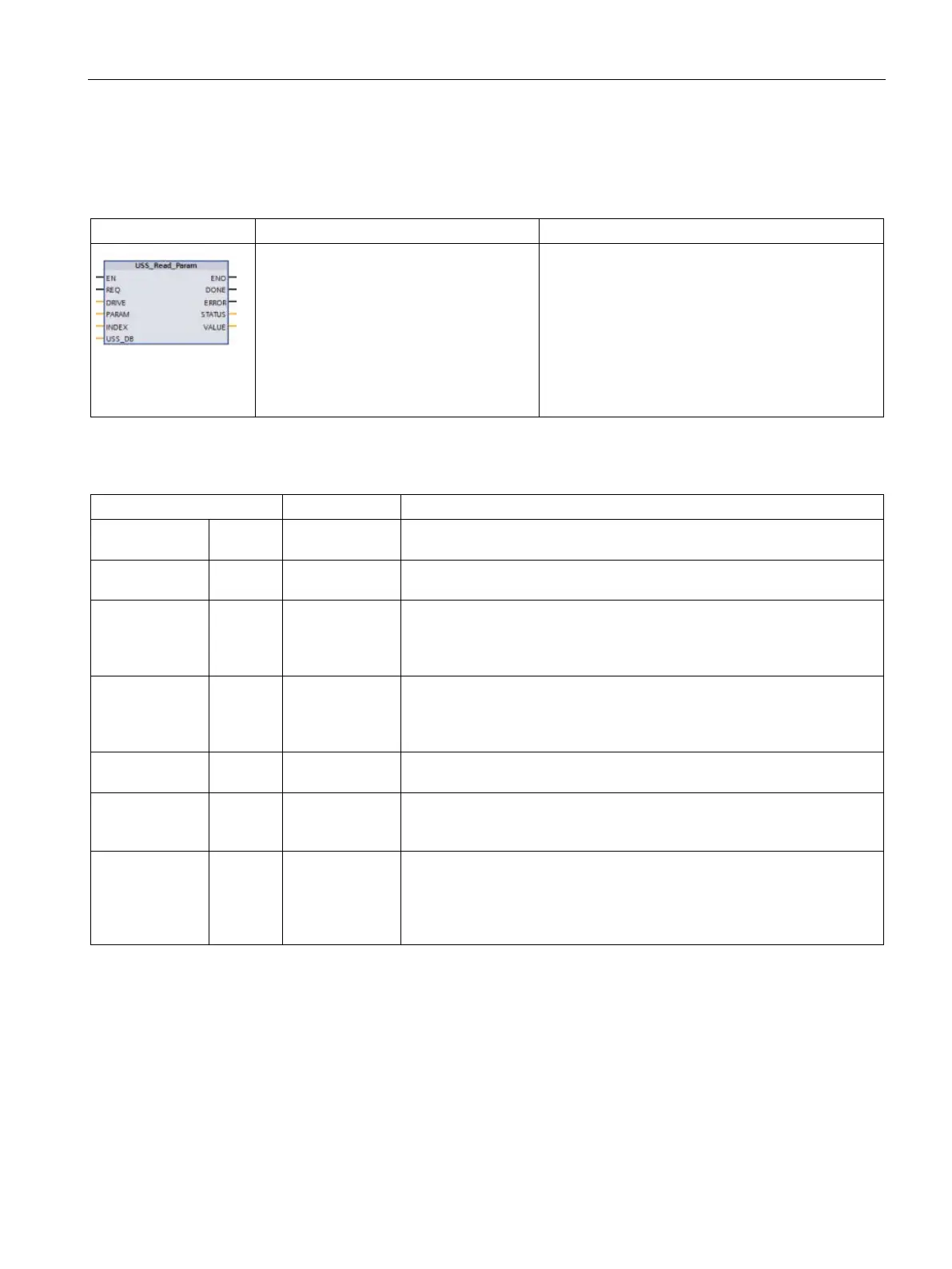
USS_Read_Param (Readout parameters from the drive)
Table 13- 47 USS_Read_Param instruction
USS_Read_Param(REQ:=_bool_in_,
DRIVE:=_usint_in_,
PARAM:=_uint_in_,
INDEX:=_uint_in_,
DONE=>_bool_out_,
ERROR=>_bool_out_,
STATUS=>_word_out_,
VALUE=>_variant_out_,
The USS_Read_Param instruction reads a parame-
ter from a drive. All USS functions associated with
one USS network and PtP communication port must
use the same data block. USS_Read_Param must
be called from a main program cycle OB.
Table 13- 48 Data types for the parameters
REQ IN Bool Send request: When true, REQ indicates that a new read request is de-
sired. This is ignored if the request for this parameter is already pending.
DRIVE IN USInt Drive address: DRIVE is the address of the USS drive. The valid range is
PARAM IN UInt Parameter number: PARAM designates which drive parameter is written.
The range of this parameter is 0 to 2047. On some drives, the most signif-
icant byte can access PARAM values greater than 2047. See your drive
manual for details on how to access an extended range.
INDEX IN UInt Parameter index: INDEX designates which Drive Parameter index is to be
written. A 16-bit value where the Least Significant Byte is the actual index
value with a range of (0 to 255). The Most Significant Byte may also be
used by the drive and is drive-specific. See your drive manual for details.
USS_DB INOUT USS_BASE The name of the instance DB that is created and initialized when a
USS_Drive_Control instruction is placed in your program.
VALUE IN Word, Int, UInt,
DWord, DInt,
This is the value of the parameter that was read and is valid only when
the DONE bit is true.
DONE
1
OUT Bool When true, indicates that the VALUE output holds the previously request-
ed read parameter value. This bit is set when USS_Drive_Control sees
the read response data from the drive. This bit is reset when either: you
request the response data using another USS_Read_Param poll, or on
the second of the next two calls to USS_Drive_Control.

 Loading...
Loading...















