Technology instructions
10.3 Motion control
S7-1200 Programmable controller
System Manual, V4.2, 09/2016, A5E02486680-AK
679
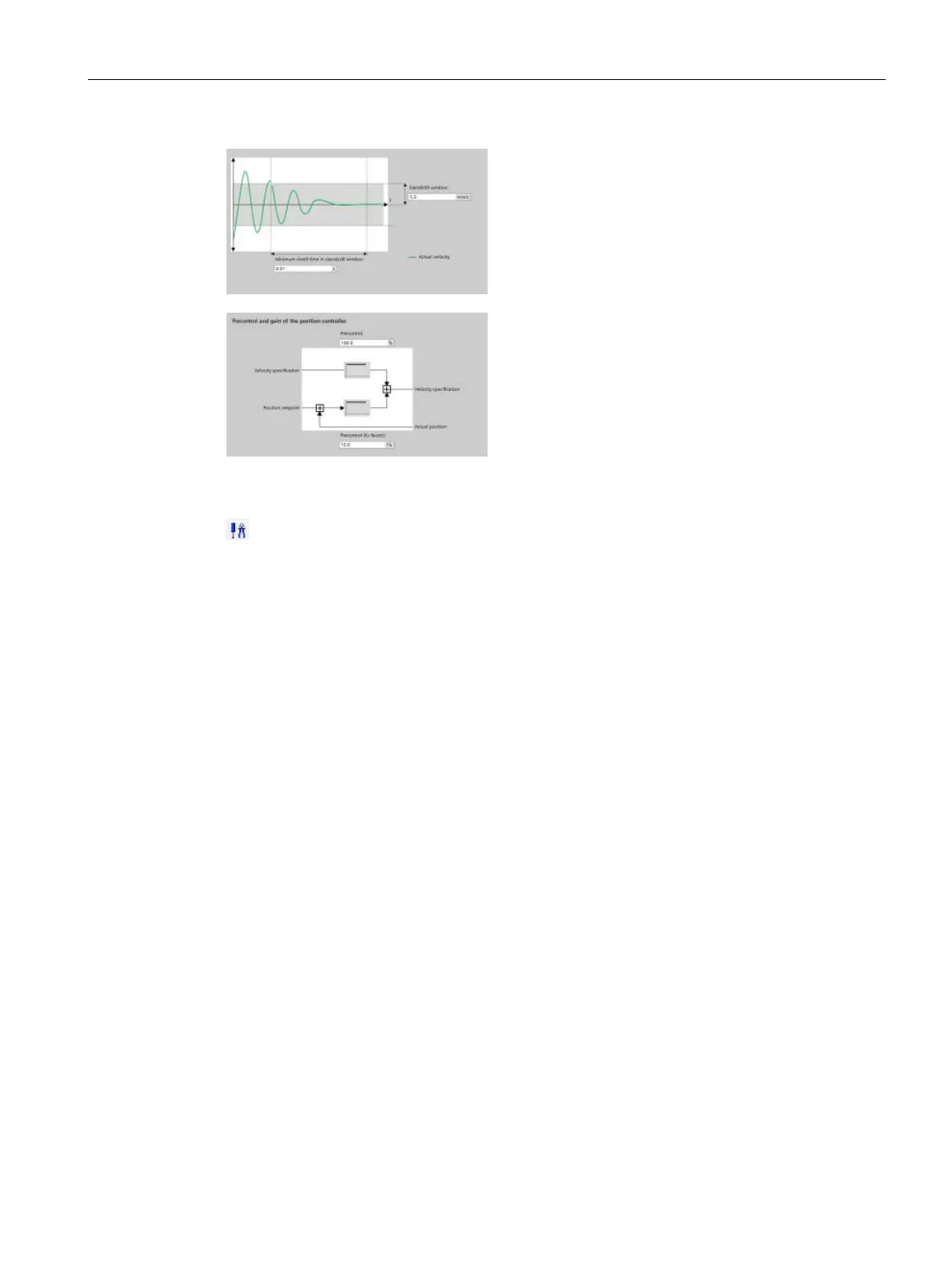
"Standstill signal": You can configure the
foll
owing parameters:
Minimum dwell time in standstill window
Standstill window.
"Control loop": You can configure the veloc
i-
ty gain known as "Precontrol (Kv factor)".
Use the "Commissioning" control panel to test the functionality in
dependently from your user
Click the "Startup" icon to commission the axis.
The control panel shows the current status of the axis. Not only can you enable and disable
the axis, but you can also test the positioning of the axis (both in absolute and relative terms)
and can specify the velocity, acceleration and deceleration. You can also test the homing
and jogging tasks. The control panel also allows you to acknowledge errors.
When you create a technology object for S7-1200 motion control, the CPU automatically
creates the organization block "MC-Servo (OB 91)" for processing the technology objects.
The motion control functionality of the technology objects creates its own priority class, and
the SIMATIC S7-1200 execution system calls the OB according to the application cycle.
The MC-Servo OB is write-protected. You cannot change the contents.
The position control algorithms of all technology objects configured for motion control on the
CPU are calculated within the MC-Servo OB.
You can set the application cycle and the priority of the organization block in accordance
with your requirements for control quality and system load. Multiple ServoOBs can link to a
"CyclicServoEvent". The Property page of the MC-Servo OB shows the two changeable
values of the CyclicServoEvent:
● Priority number
● Cycle time

 Loading...
Loading...















