Technology instructions
10.3 Motion control
S7-1200 Programmable controller
730 System Manual, V4.2, 09/2016, A5E02486680-AK
Note
If the homing search does not function as you expected, check the inputs assigned to the
hardware limits or to the reference point. These inputs may have had their edge interrupts
disabled in device configuration.
ration data for the axis technology object of concern to see which inputs
(if any) are assigned for "HW Low Limit Switch Input", "HW High Limit Switch Input", and
"Input reference point switch". Then open the Device configuration for the CPU and examine
ea
ch of the assigned inputs. Verify the "Enable rising edge detection" and "Enable falling
edge detection" are both selected. If these properties are not selected, delete the specified
inputs in the axis configuration and select them again.
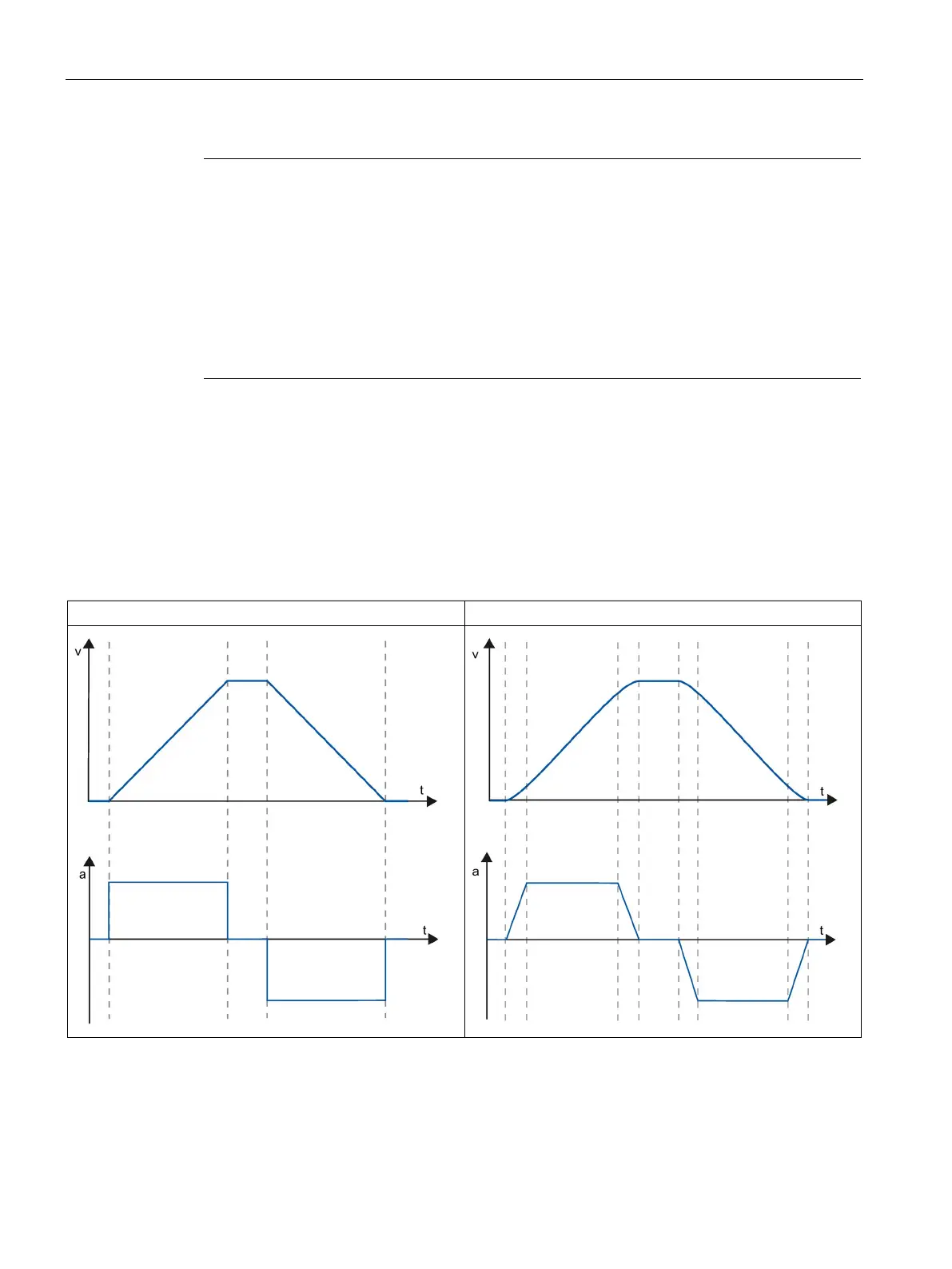
With the jerk limit you can reduce the stresses on your mechanics during an acceleration
and deceleration ramp. The value for the acceleration and deceleration is not changed
abruptly when the step limiter is active; it is adapted in a transition phase. The figure below
shows the velocity and acceleration curve without and with jerk limit.
Table 10- 54 Jerk limit
Travel without step limiter
The jerk limit gives a "smoothed" velocity profile of the axis motion. This ensures soft starting
and braking of a conveyor belt for example.

 Loading...
Loading...















