Communication processor and Modbus TCP
13.6 Legacy PtP communication (CM/CB 1241 only)
S7-1200 Programmable controller
System Manual, V4.2, 09/2016, A5E02486680-AK
1221
TRUE for one execution after the last request was completed with no error
ERROR OUT Bool TRUE for one execution after the last request was completed with an error
Execution condition code (Default value: 0)
Table 13- 97 Condition codes
80B0 Transmit interrupt configuration is not allowed.
Break time is greater than the maximum allowed value.
Idle time is greater than the maximum allowed value.
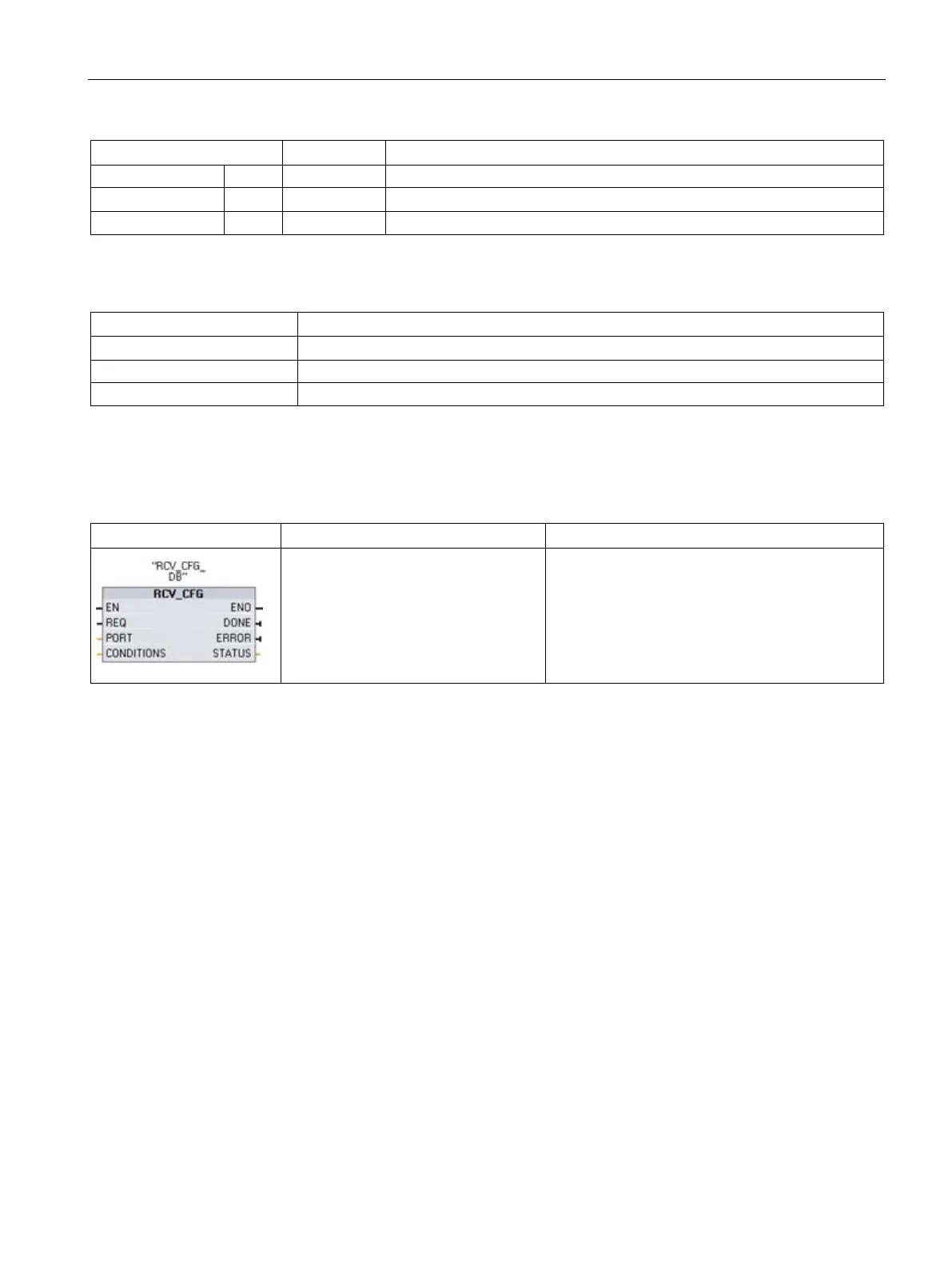
RCV_CFG (Configure serial receive parameters dynamically)
Table 13- 98 RCV_CFG (Receive Configuration) instruction
REQ:=_bool_in_,
PORT:=_uint_in_,
CONDITIONS:=_struct_in_,
DONE=>_bool_out_,
ERROR=>_bool_out_,
RCV_CFG performs dynamic configuration of seri-
al receiver parameters for a PtP communication
port. This instruction configures the conditions that
signal the start and end of a received message.
Any queued messages within a CM or CB are
discarded when RCV_CFG is executed.
1
STEP 7 automatically creates the DB when you insert the instruction.
You can set up the initial static configuration of the communication port in the device
configuration properties, or just use the default values. You can execute the RCV_CFG
instruction in your program to change the configuration.
The RCV_CFG configuration changes are not permanently stored in the CPU. The
parameters configured in the device configuration are restored when the CPU transitions
from RUN to STOP mode and after a power cycle. See Configuring receive parameters
(Page 1097) for more information.

 Loading...
Loading...















