Technology instructions
10.3 Motion control
S7-1200 Programmable controller
754 System Manual, V4.2, 09/2016, A5E02486680-AK
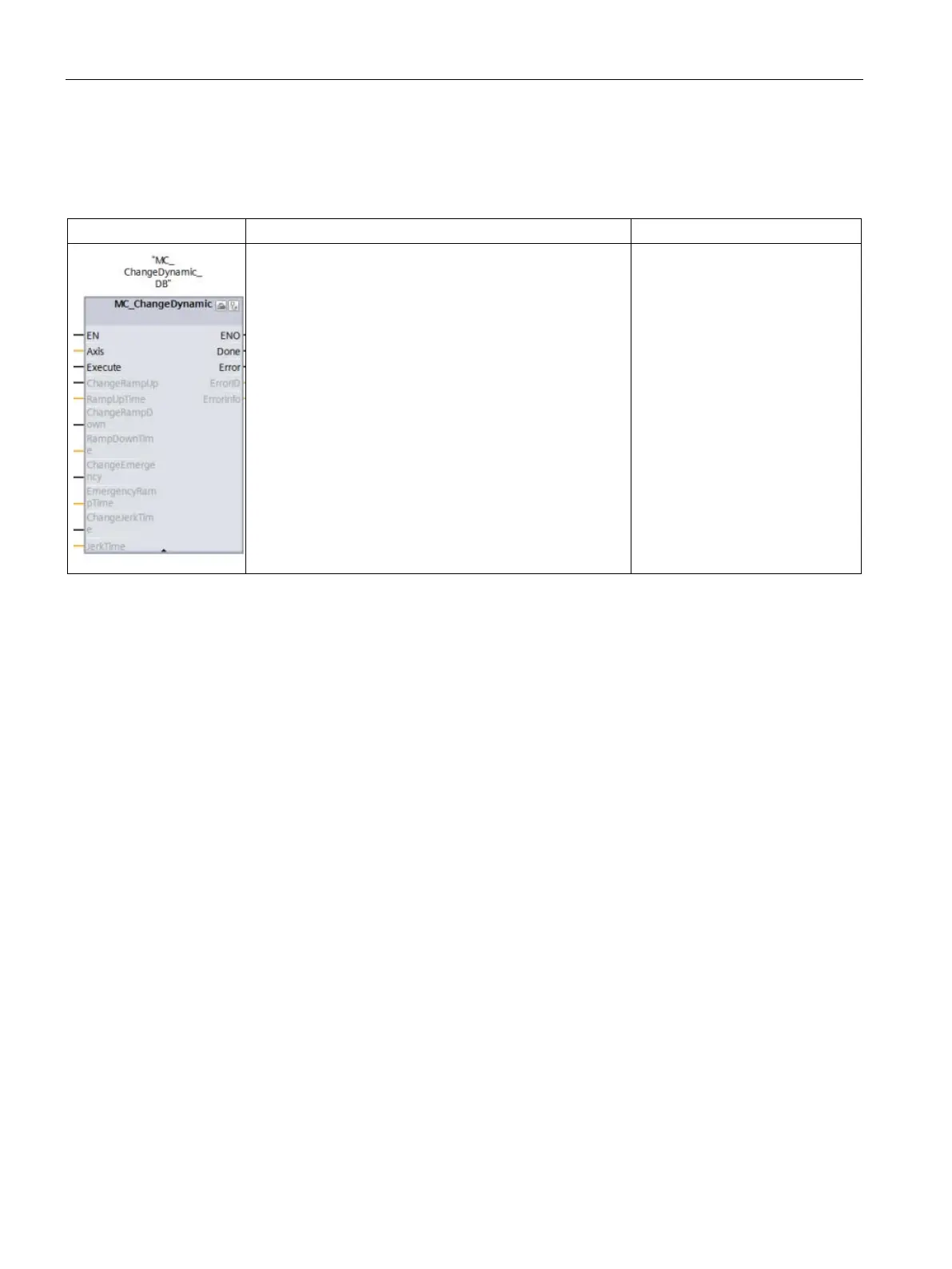
MC_ChangeDynamic (Change dynamc settings for the axis)
Table 10- 75 MC_ChangeDynamic instruction
Execute:=_bool_in_,
ChangeRampUp:=_bool_in_,
RampUpTime:=_real_in_,
ChangeRampDown:=_bool_in_,
RampDownTime:=_real_in_,
ChangeEmergency:=_bool_in_,
EmergencyRampTime:=_real_in_,
ChangeJerkTime:=_bool_in_,
JerkTime:=_real_in_,
Done=>_bool_out_,
Error=>_bool_out_,
ErrorID=>_word_out_,
ErrorInfo=>_word_out_);
Changes the dynamic settings of
a motion control axis:
• Change the ramp-up time
(acceleration) value
• Change the ramp-down time
(deceleration) value
• Change the emergency stop
ramp-down time (emergency
stop deceleration) value
• Change the smoothing time
(jerk) value
STEP 7 automatically creates the DB when you insert the instruction.
2
In the SCL example, "MC_ChangeDynamic_DB " is the name of the instance DB.

 Loading...
Loading...















