Technology instructions
10.2 PID control
S7-1200 Programmable controller
610 System Manual, V4.2, 09/2016, A5E02486680-AK
The PID_Temp instruction provides a universal PID controller that allows handling of the
specific requirements of temperature control.
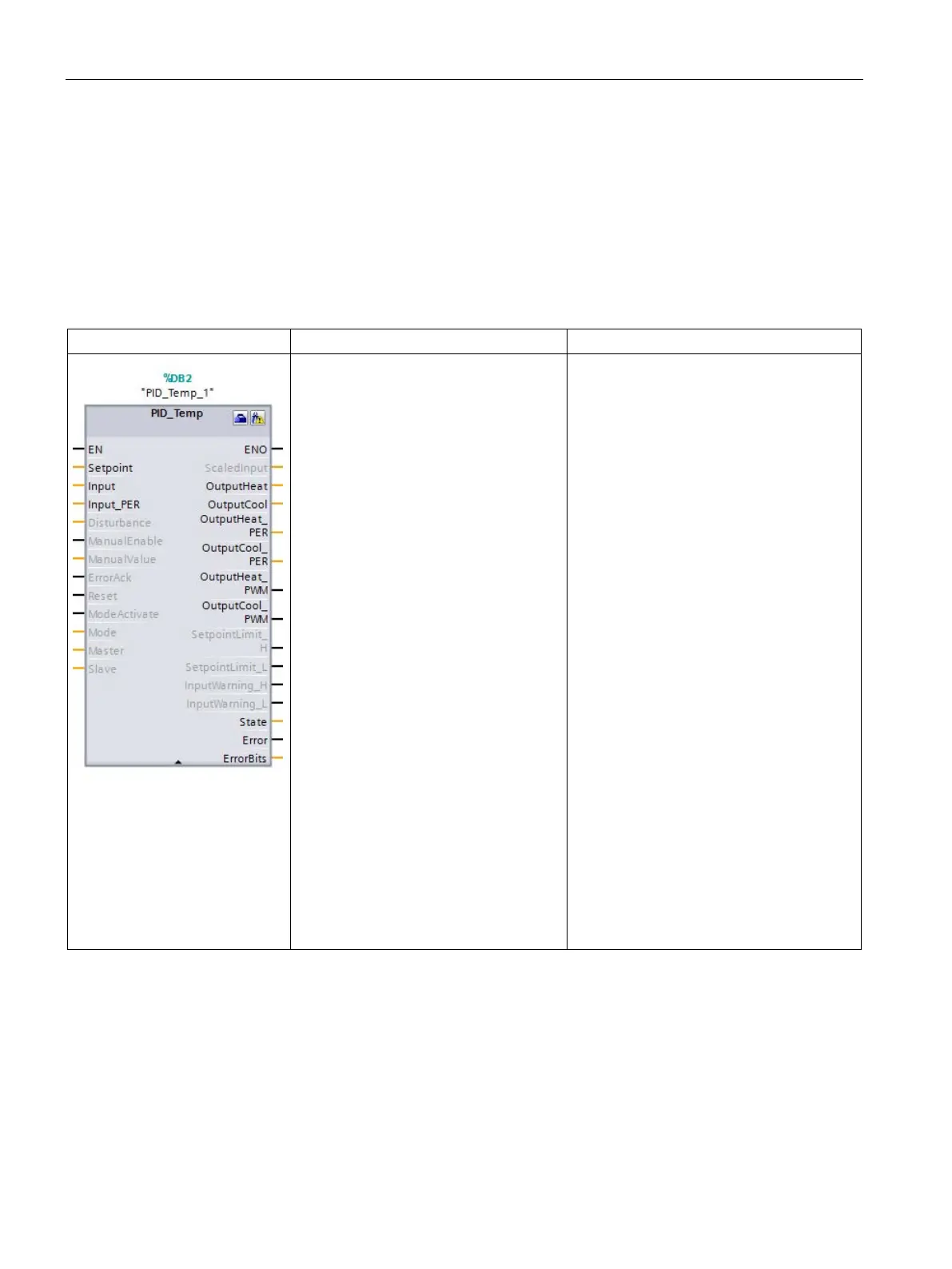
Table 10- 26 PID_Temp instruction
Setpoint:=_real_in_,
Input:=_real_in_,
Input_PER:=_int_in_,
Disturbance:=_real_in_,
ManualEnable:=_bool_in_,
ManualValue:=_real_in_,
ErrorAck:=_bool_in_,
Reset:=_bool_in_,
ModeActivate:=_bool_in_,
Mode:=_int_in_,
Master:=_dword_in
Save:=_dword_in
ScaledInput=>_real_out_,
OutputHeat=>_real_out_,
OutputCool=>_real_out_,
OutputHeat_PER=>_int_out_,
OutputCool_PER=>_int_out_,
Out-
putHeat_PWM=>_bool_out_,
Out-
putCool_PWM=>_bool_out_,
SetpointLimit_H=>_bool_out_,
SetpointLimit_L=>_bool_out_,
InputWarn-
ing_H=>_bool_out_,
InputWarn-
ing_L=>_bool_out_,
State=>_int_out_,
Error=>_bool_out_,
PID_Temp provides these capabilities:
• Heating and cooling of the process with
different actuators
• Integrated autotuning to handle temper-
ature processes
• Cascading to process more than one
temperature that depends on the same
actuator
STEP 7 automatically creates the technology object and instance DB when you insert the instruction. The instance DB
contains the parameters of the technology object.
2
In the SCL example, "PID_Temp_1" is the name of the instance DB.

 Loading...
Loading...















