Technology instructions
10.3 Motion control
S7-1200 Programmable controller
System Manual, V4.2, 09/2016, A5E02486680-AK
737
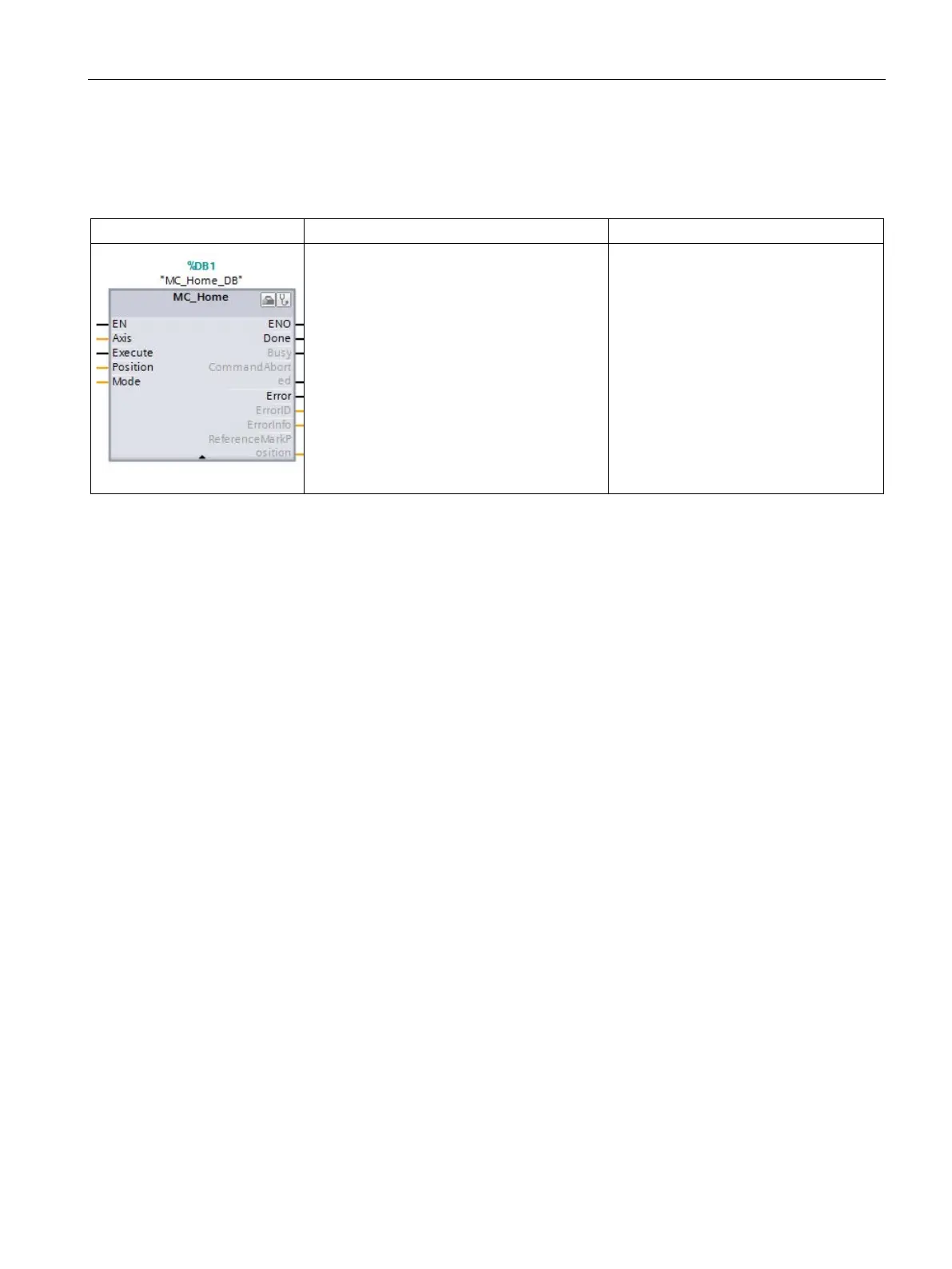
Table 10- 59 MC_Home instruction
Axis:=_multi_fb_in_,
Execute:=_bool_in_,
Position:=_real_in_,
Mode:=_int_in_,
Done=>_bool_out_,
Busy=>_bool_out_,
CommandAborted=>_bool_out_,
Error=>_bool_out_,
ErrorID=>_word_out_,
ErrorInfo=>_word_out_,
ReferenceMarkPosi-
Use the MC_Home instruction to match
the axis coordinates to the real, physical
drive position. Homing is required for
absolute positioning of the axis:
In order to use the MC_Home instruction,
the axis must first be enabled.
STEP 7 automatically creates the DB when you insert the instruction.
2
In the SCL example, "MC_Home_DB" is the name of the instance DB.
The following types of homing are available:
● Direct homing absolute (Mode = 0): The current axis position is set to the value of
parameter "Position".
● Direct homing relative (Mode = 1): The current axis position is offset by the value of
parameter "Position".
● Passive homing (Mode = 2): During passive homing, the MC_Home instruction does not
carry out any homing motion. The traversing motion required for this step must be
implemented by the user via other motion control instructions. When the reference point
switch is detected, the axis is homed.
● Active homing (Mode = 3): The homing procedure is executed automatically.
● Absolute encoder adjustment (relative) (Mode = 6): The current position is shifted by the
value of the parameter "MC_Home.Position".
● Absolute encoder adjustment (absolute) (Mode = 7): The current position is set to the
value of the parameter "MC_Home.Position".

 Loading...
Loading...















