Technology instructions
10.3 Motion control
S7-1200 Programmable controller
738 System Manual, V4.2, 09/2016, A5E02486680-AK
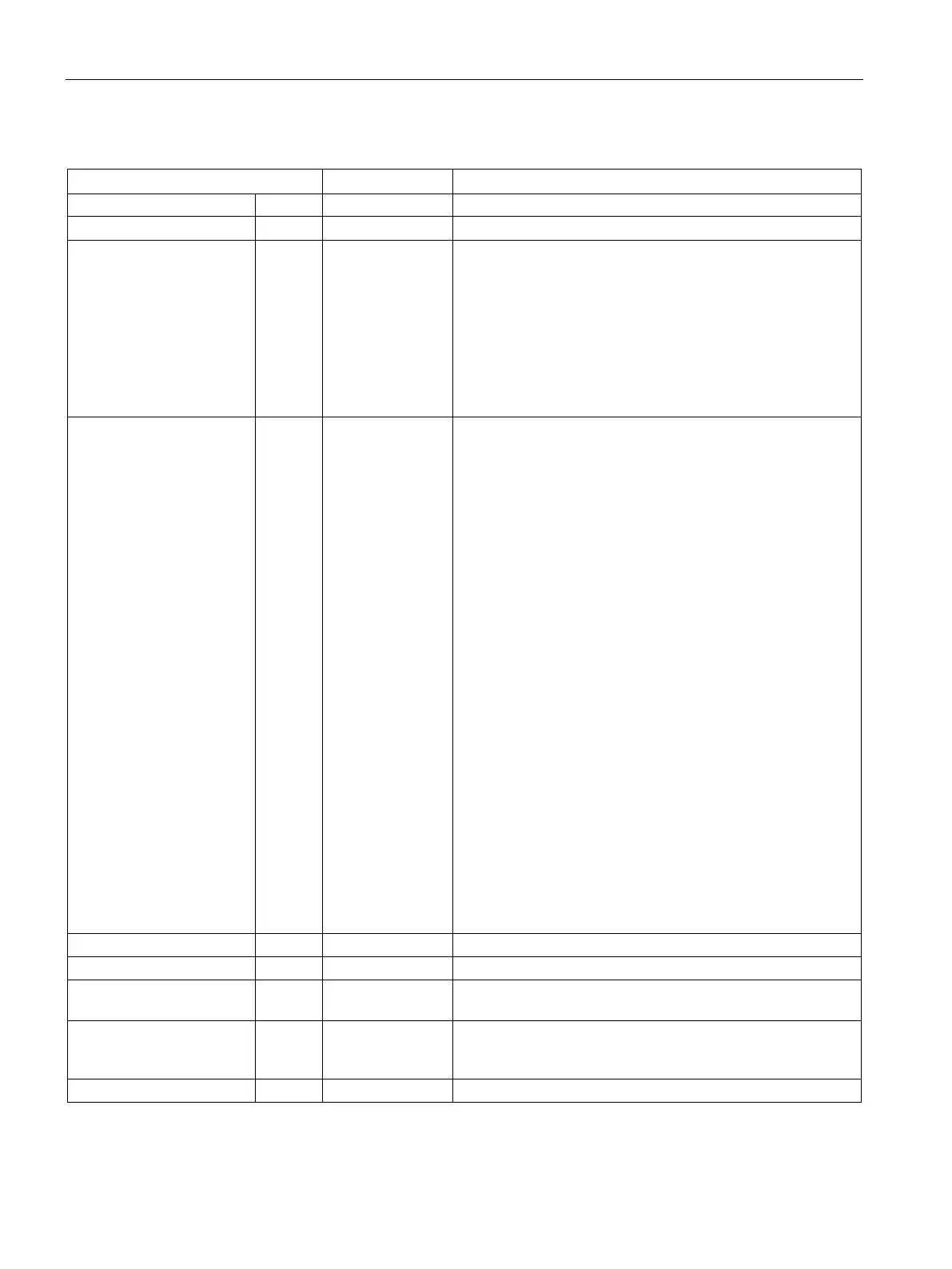
Table 10- 60 Parameters for the MC_Home instruction
Execute IN Bool Start of the task with a positive edge
Position IN Real
• Mode = 0, 2, and 3 (Absolute position of axis after comple-
tion of the homing operation)
• Mode = 1 (Correction value for the current axis position)
• Mode = 6 (The current position is shifted by the value of
the parameter "MC_Home.Position".)
• Mode = 7 (The current position is set to the value of the
parameter "MC_Home.Position".)
12
12
Mode IN Int Homing mode:
• 0: Direct homing absolute
New axis position is the position value of parameter "Posi-
tion".
• 1: Direct homing relative
New axis position is the current axis position + position
value of parameter "Position".
• 2: Passive homing
Homing according to the axis configuration. Following
homing, the value of parameter "Position" is set as the
new axis position.
• 3: Active homing
Reference point approach in accordance with the axis
configuration. Following homing, the value of parameter
"Position" is set as the new axis position.
• 6: The current position is shifted by the value of the pa-
rameter "MC_Home.Position". The calculated absolute
value offset is stored retentively in the CPU.
(<Axis name>.StatusSensor.AbsEncoderOffset)
• 7: The current position is set to the value of the parameter
"MC_Home.Position". The calculated absolute value offset
is stored retentively in the CPU.
(<Axis name>.StatusSensor.AbsEncoderOffset)
TRUE = The task is being executed.
CommandAborted OUT Bool TRUE = During execution, the task was aborted by another
Error OUT Bool TRUE = An error has occurred during execution of the task.
The cause of the error can be found in parameters "ErrorID"
Error ID for parameter "Error""

 Loading...
Loading...















