Communication processor and Modbus TCP
13.7 Legacy USS communication (CM/CB 1241 only)
S7-1200 Programmable controller
System Manual, V4.2, 09/2016, A5E02486680-AK
1245
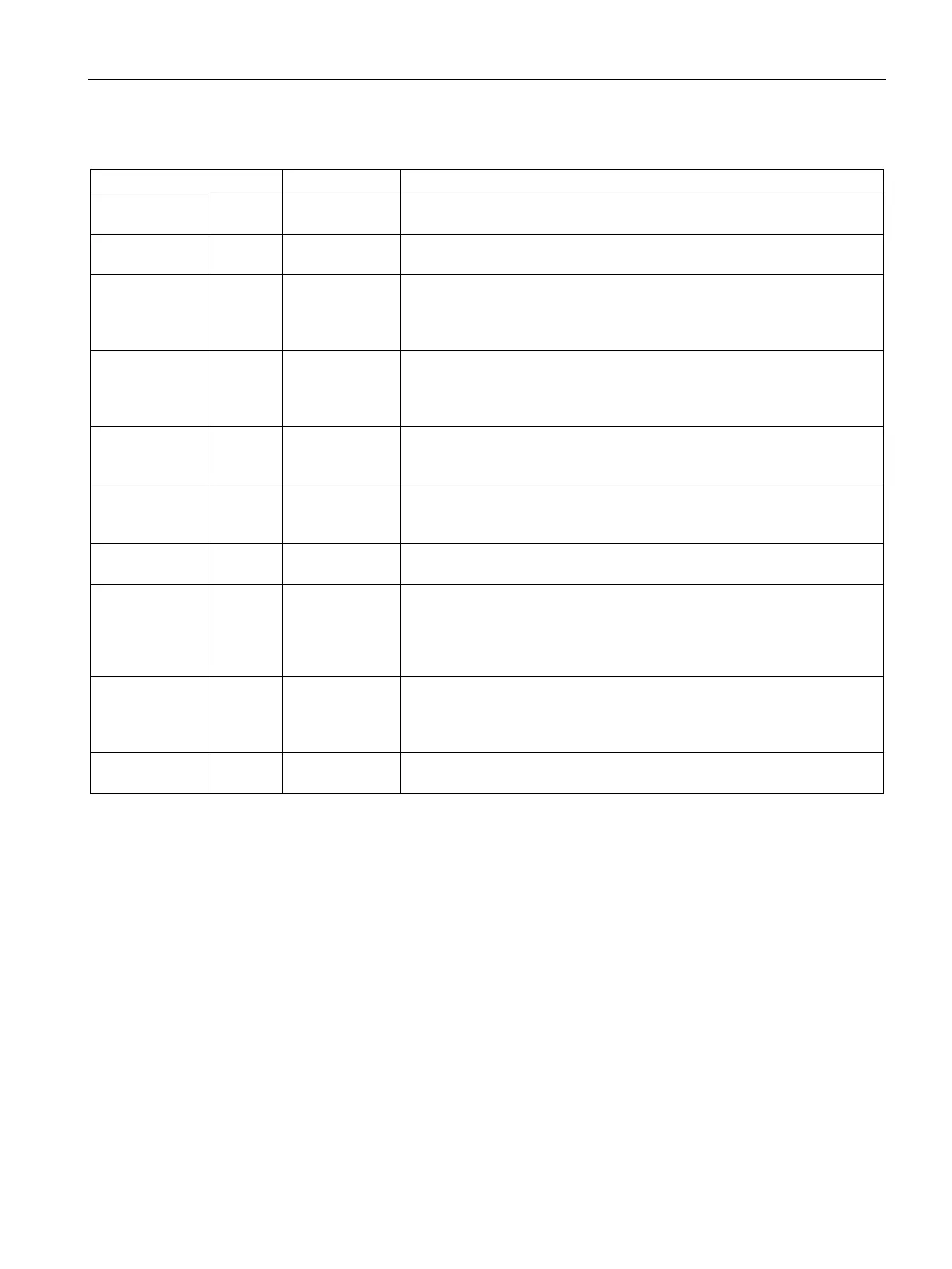
Table 13- 127 Data types for the parameters
REQ IN Bool Send request: When true, REQ indicates that a new write request is de-
sired. This is ignored if the request for this parameter is already pending.
DRIVE IN USInt Drive address: DRIVE is the address of the USS drive. The valid range is
drive 1 to drive 16.
PARAM IN UInt Parameter number: PARAM designates which drive parameter is written.
The range of this parameter is 0 to 2047. On some drives, the most signif-
icant byte can access PARAM values greater than 2047. See your drive
manual for details on how to access an extended range.
INDEX IN UInt
Parameter index: INDEX designates which Drive Parameter index is to be
written. A 16-bit value where the least significant byte is the actual index
value with a range of (0 to 255). The most significant byte may also be
used by the drive and is drive-specific. See your drive manual for details.
EEPROM IN Bool Store To Drive EEPROM: When true, a write drive parameter transaction
will be stored in the drive EEPROM. If false, the write is temporary and
will not be retained if the drive is power cycled.
VALUE IN Word, Int, UInt,
DWord, DInt,
The value of the parameter that is to be written. It must be valid on the
transition of REQ.
USS_DB INOUT USS_BASE The name of the instance DB that is created and initialized when a
USS_DRV instruction is placed in your program.
DONE
1
OUT Bool When true, DONE indicates that the input VALUE has been written to the
drive. This bit is set when USS_DRV sees the write response data from
the drive. This bit is reset when either you request the response data via
another USS_WPM poll, or on the second of the next two calls to
ERROR OUT Bool
When true, ERROR indicates that an error has occurred and the STATUS
output is valid. All other outputs are set to zero on an error. Communica-
tion errors are only reported on the USS_PORT instruction ERROR and
STATUS OUT Word
STATUS indicates the result of the write request. Additional information is
available in the "USS_Extended_Error" variable for some status codes.
The DONE bit indicates that valid data has been read from the referenced motor drive and delivered to the CPU. It does
not indicate that the USS library is capable of immediately reading another parameter. A blank PKW request must be
sent to the motor drive and must also be acknowledged by the instruction before the parameter channel for the specific
drive becomes available for use. Immediately calling a USS_RPM or USS_WPM FC for the specified motor drive will re-

 Loading...
Loading...















