Technology instructions
10.3 Motion control
S7-1200 Programmable controller
System Manual, V4.2, 09/2016, A5E02486680-AK
709
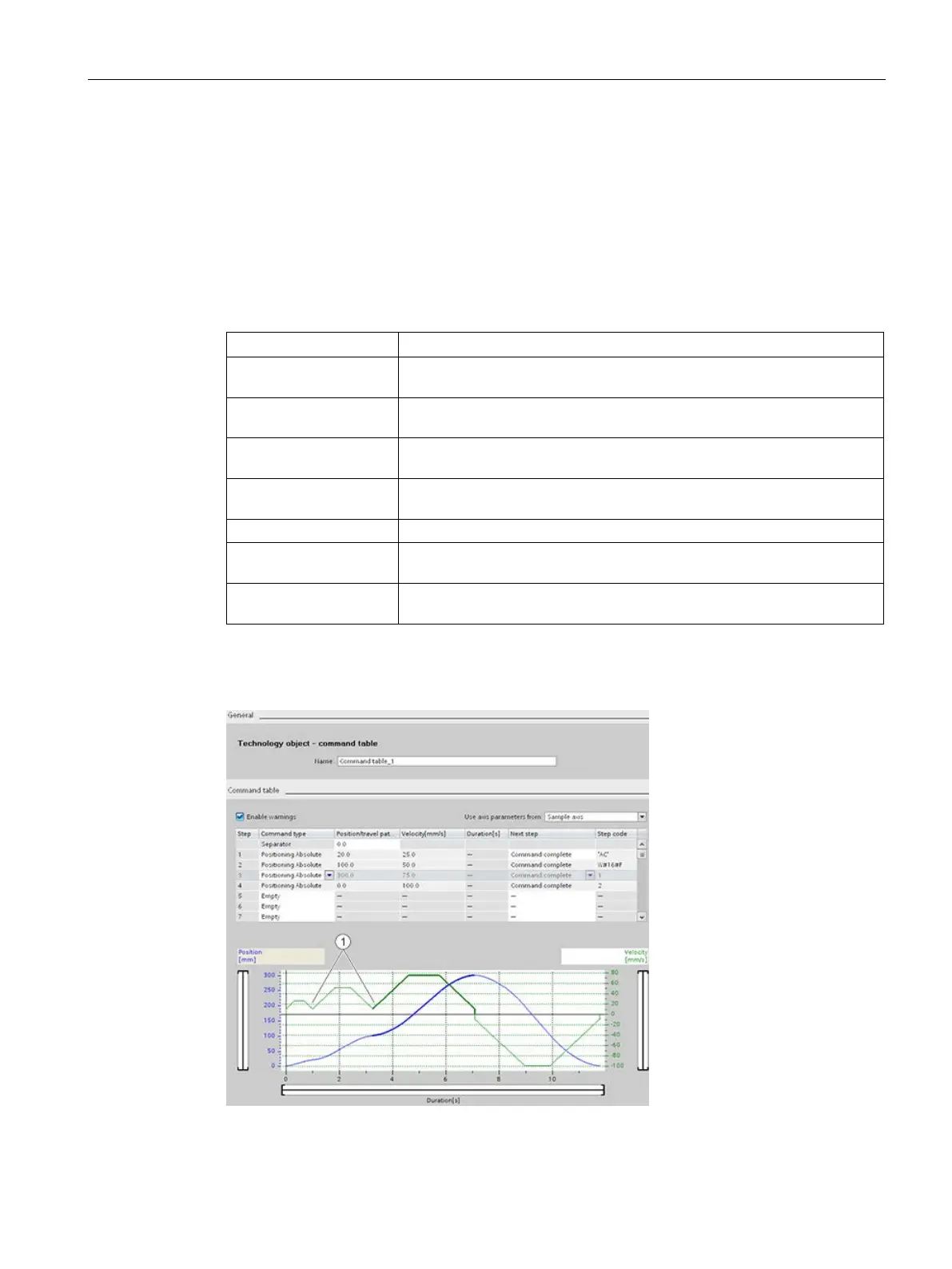
Planning the steps for your application
You can create the desired movement sequence in the "Command Table" configuration
window, and check the result against the graphic view in the trend diagram.
You can select the command types that are to be used for processing the command table.
Up to 32 steps can be entered. The commands are processed in sequence, easily producing
a complex motion profile.
Table 10- 48 MC_CommandTable command types
Empty The empty serves as a placeholder for any commands to be added. The
empty entry is ignored when the command table is processed
Halt Pause axis.
Note: The command only takes place after a "Velocity setpoint" command.
Positioning Relative Positions the axis based upon distance. The command moves the axis by
the given distance and velocity.
Positioning Absolute Positions the axis based upon location. The command moves the axis to
the given location, using the velocity specified.
Moves the axis at the given velocity.
Wait Waits until the given period is over. "Wait" does not stop an active travers-
Separator Adds a "Separator" line above the selected line. The separator line allows
more than one profile to be defined in a single command table.
In the figure below, "Command complete" is used as the transition to the next step. This type
of transition allows your device to decelerate to the start/stop speed and then accelerate
once again at the start of the next step.
Axis decelerates to the start/stop speed between steps.

 Loading...
Loading...















