Technology instructions
10.3 Motion control
S7-1200 Programmable controller
746 System Manual, V4.2, 09/2016, A5E02486680-AK
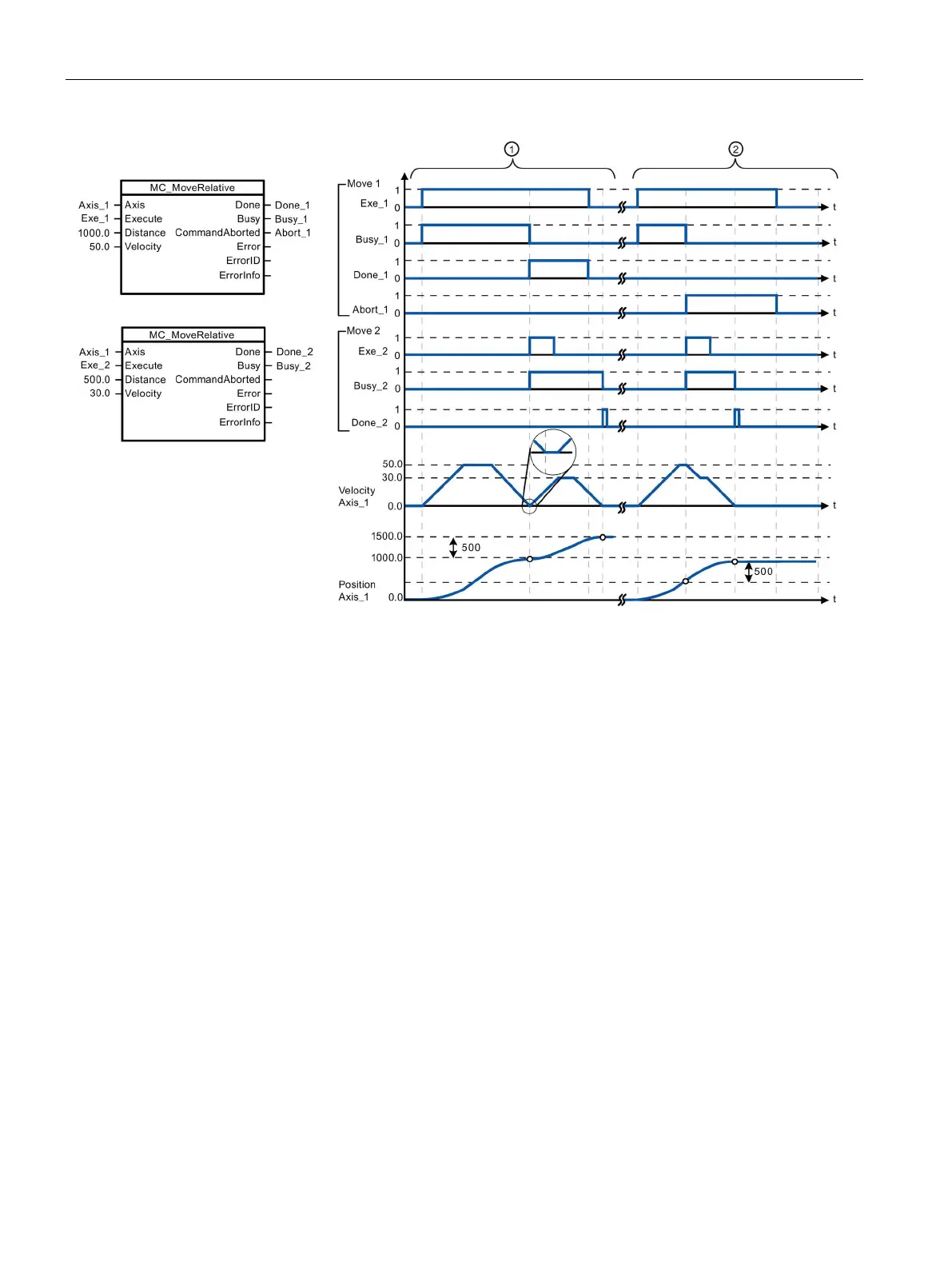
The following values were configured in the "Dynamics > General" configuration window: Acceleration = 10.0 and Decelera-
The axis is moved by an MC_MoveRelative task by the distance ("Distance") 1000.0. When the axis reaches the
target position, this is signaled via "Done_1". When "Done_1" = TRUE, another MC_MoveRelative task, with travel
distance 500.0, is started. Because of the response times (for example, cycle time of user program), the axis
comes to a standstill briefly (see zoomed-in detail). When the axis reaches the new target position, this is signaled
An active MC_MoveRelative task is aborted by another MC_MoveRelative task. The abort is signaled via
"Abort_1". The axis is then moved at the new velocity by the new distance ("Distance") 500.0. When the new target
position is reached, this is signaled via "Done_2".
The MC_MoveRelative task can be aborted
by the following motion control tasks:
MC_Home Mode = 3
MC_Halt
MC_MoveAbsolute
MC_MoveRelative
MC_MoveVelocity
MC_MoveJog
The new MC_MoveRelative task aborts the
following active motion control tasks:
MC_Home Mode = 3
MC_Halt
MC_MoveAbsolute
MC_MoveRelative
MC_MoveVelocity
MC_MoveJog

 Loading...
Loading...















