Technology instructions
10.3 Motion control
S7-1200 Programmable controller
748 System Manual, V4.2, 09/2016, A5E02486680-AK
PositionControlled IN Bool
• 0: speed controlled
• 1: position controlled (Default value: True)
InVelocity OUT Bool TRUE:
• If "Current" = FALSE: The velocity specified in parameter "Ve-
locity" was reached.
• If "Current" = TRUE: The axis travels at the current velocity at
the start time.
TRUE = The task is being executed.
CommandAborted OUT Bool TRUE = During execution the task was aborted by another task.
Error OUT Bool TRUE = An error has occurred during execution of the task. The
cause of the error can be found in parameters "ErrorID" and "Error-
Error ID for parameter "Error" (Default value: 0000)
Error info ID for parameter "ErrorID" (Default value: 0000)
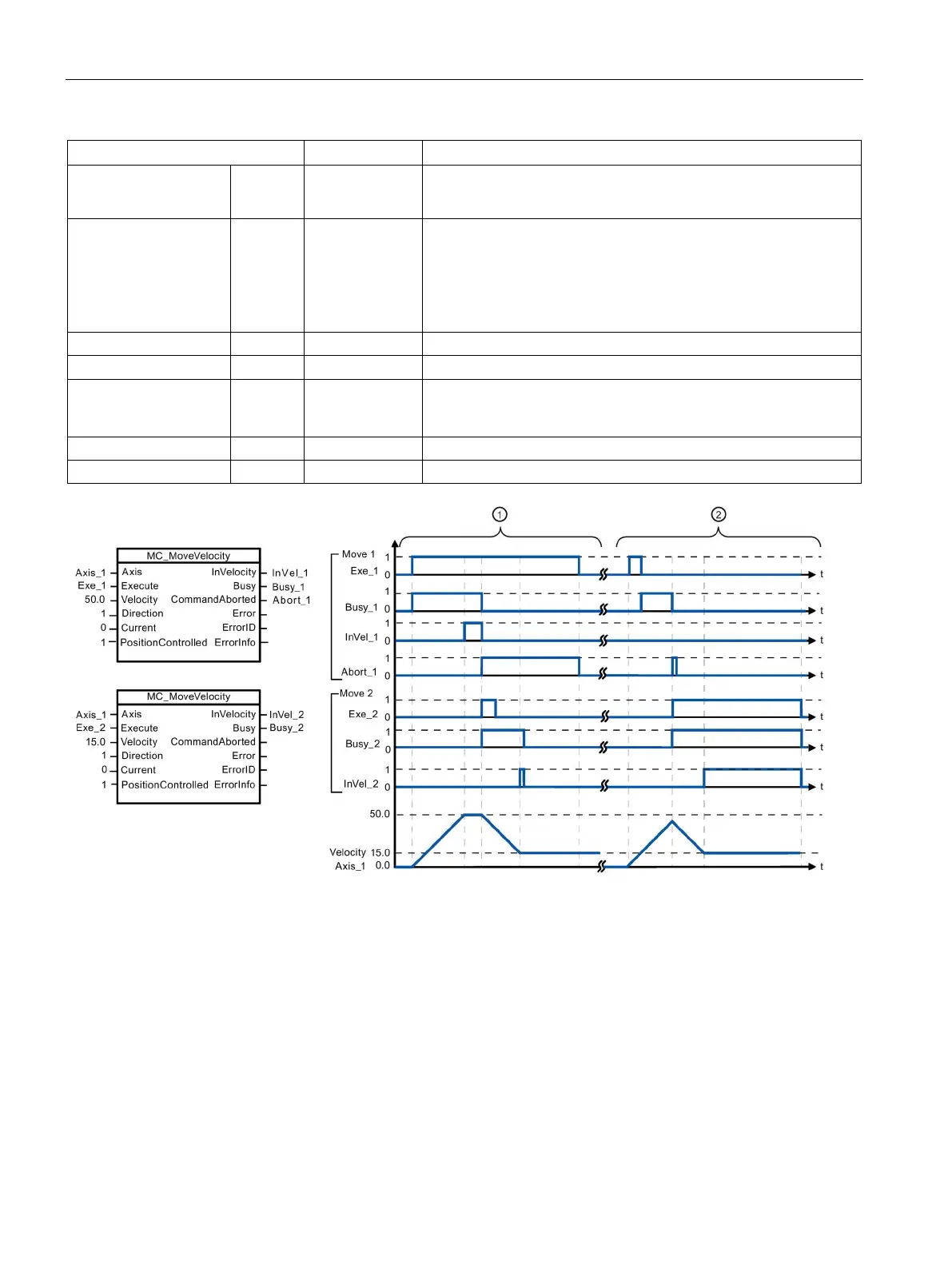
The following values were configured in the "Dynamics > General" configuration window: Acceleration = 10.0 and Decelera-
An active MC_MoveVelocity task signals via "InVel_1" that its target velocity has been reached. It is then aborted
by another MC_MoveVelocity task. The abort is signaled via "Abort_1". When the new target velocity 15.0 is
reached, this is signaled via "InVel_2". The axis then continues moving at the new constant velocity.
An active MC_MoveVelocity task is aborted by another MC_MoveVelocity task prior to reaching its target velocity.
The abort is signaled via "Abort_1". When the new target velocity 15.0 is reached, this is signaled via "InVel_2".
The axis then continues moving at the new constant velocity.

 Loading...
Loading...















