Technology instructions
10.3 Motion control
S7-1200 Programmable controller
770 System Manual, V4.2, 09/2016, A5E02486680-AK
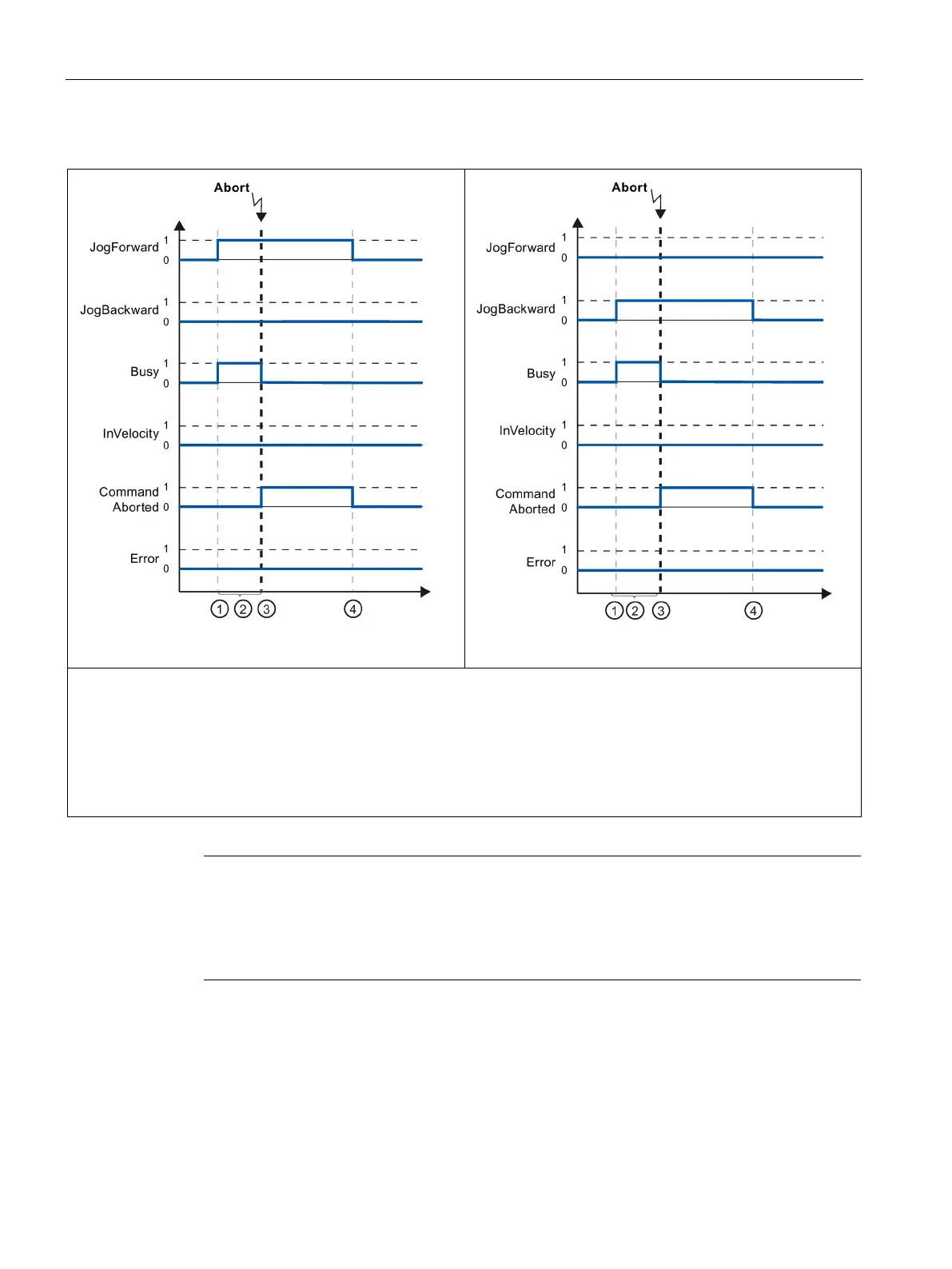
Table 10- 90 Example 2 - If the task is aborted during execution
JogForward
JogBackward
The task is started with a positive edge at the input parameter "JogForward" or "JogBackward".
② While the task is active, the output parameter "Busy" indicates the value TRUE.
③ During task execution, the task is aborted by another motion control task. If the task is aborted, output parameter
"Busy" changes to FALSE and "CommandAborted" to TRUE.
④ When the input parameter "JogForward" or "JogBackward" is reset to the value FALSE, the output parameter "Com-
mandAborted" changes its value to FALSE.
Note
The task abort is indicated in the output parameter "CommandAborted" for only one
execution cycle, if all conditions below are met:
The input parameters "JogForward" and "
JogBackward" have the value FALSE (but the axis
is still decelerating) and a new motion control task is initiated.

 Loading...
Loading...















