3.12 Dimensional Drawings of SGMAH Servomotors (3000 min
-1
)
3-65
3
Servomotor Specifications and Dimensional Drawings
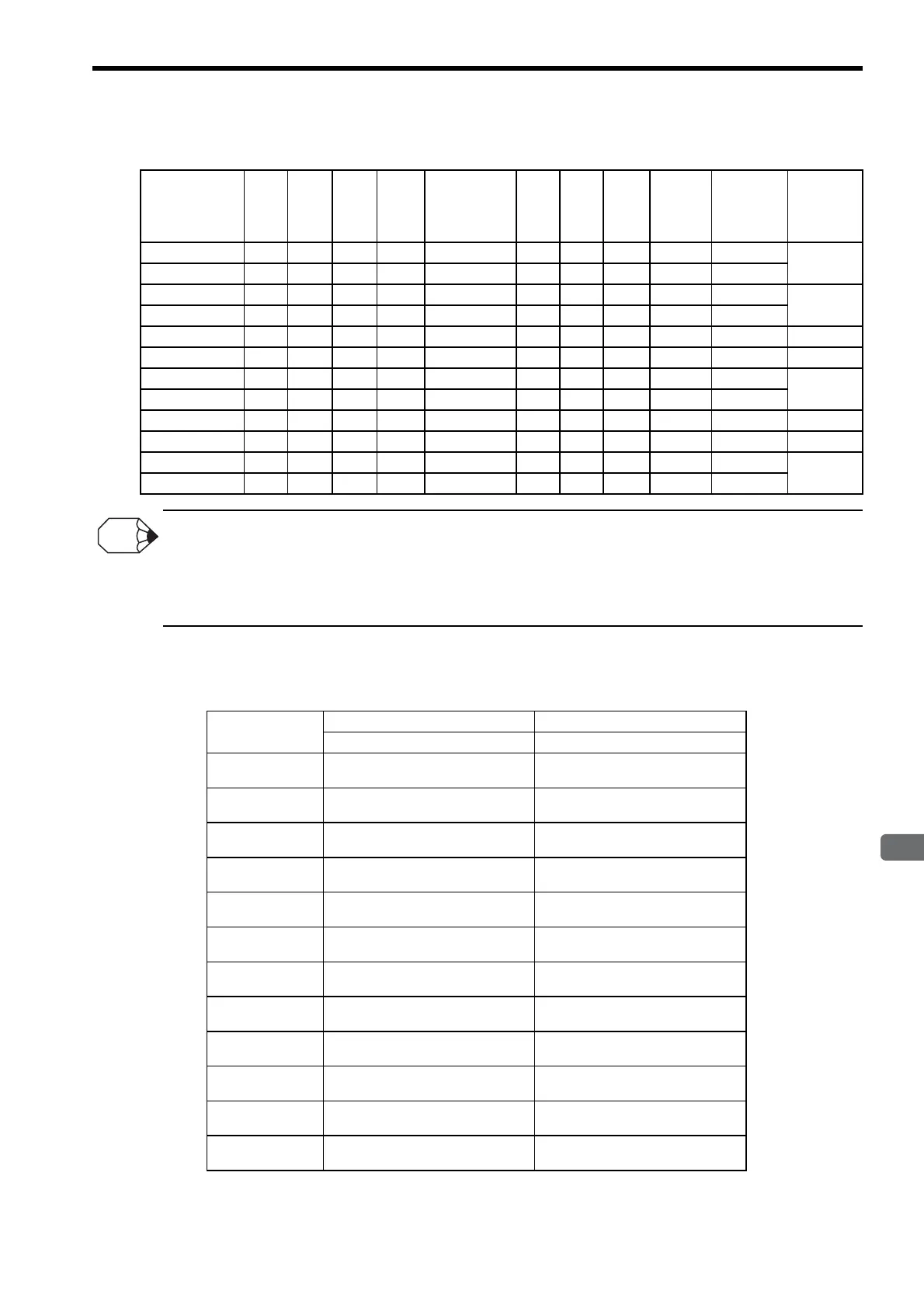
1. The dimensions for L and LL of a servomotor incorporating an encoder with super-capacitor (model: SGMAH4)
are as shown below.
SGMAH-02 and 04: L-dimension + 8.2 mm, LL-dimension +8.2 mm
SGMAH-08: L-dimension + 0 mm, LL-dimension +0 mm
2. The working point of the SGMAH servomotor radial load is at the position of minus 5 mm from the shaft end.
• Dimensional Tolerances
Units: mm
Model
SGMAH-
Gear
Ratio
LC LA LZ
Tap
×Depth
UW T
Approx.
Mass
kg
Allowable
Radial
Load
N
Allowable
Thrust
Load
N
02AH11
1/5 90 105 9 M5×10L 3.5 6 6 3.0 245
235
02AHB1
1/11 90 105 9 M5×10L 3.5 6 6 3.5 323
02AHC1
1/21 105 120 9 M6×12L 4 8 7 3.7 549
294
02AH71
1/33 105 120 9 M6×12L 4 8 7 3.8 608
04AH11
1/5 90 105 9 M5×10L 3.5 6 6 3.6 245 235
04AHB1
1/11 105 120 9 M6×12L 4 8 7 4.3 441 294
04AHC1
1/21 120 135 11 M8×16L 5 10 8 4.7 568
314
04AH71
1/33 120 135 11 M8×16L 5 10 8 7.1 657
08AH11
1/5 105 120 9 M6×12L 4 8 7 5.8 343 294
08AHB1
1/11 120 135 11 M8×16L 5 10 8 6.6 451 314
08AHC1
1/21 145 165 14 M10×20L 5 12
8 9.9 813
490
08AH71
1/33 145 165 14 M10×20L 5 12 8 9.9 921
Units: mm
Model
SGMAH-
Flange Face Dimensions Shaft-end Dimensions
LB S
02AH11
02AHB1
02AHC1
02AH71
04AH11
04AHB1
04AHC1
04AH71
08AH11
08AHB1
08AHC1
08AH71

 Loading...
Loading...






