Setting 68: High Slip Braking
If the load inertia is large the High Slip Braking function can be used to shorten the deceleration time compared to simply coasting to stop. The High Slip
Braking function manipulates the output frequency while monitoring the output current and DC bus to create a large slip condition. It consumes regenerative
energy created as the motor slows, and this energy is consumed in the motor windings. This slip is then used to slow the motor until it stops.
The result is a relatively quick way of stopping the motor.
Setting 6A: Drive Enable
A digital input configured as a Drive Enable input (H1-0o = 6A) will prevent the drive from executing a Run command until the input is closed. When
the Drive Enable input is open, the digital operator will display “dnE to indicate that the drive is disabled. If a Run command is closed prior to the Drive
Enable input being closed, then the drive will not run until the Run command is cycled. If the Drive Enable input is opened while the drive is running,
the drive will stop using the method set by parameter b1-03.”
No. Parameter Name Setting Range Default Page
b1-03 Stopping Method Selection
0: Ramp to Stop
1: Coast to Stop
2: DC Injection Braking to Stop
3: Coast with Timer
0 −
Note: DC Injection Braking is not possible in PM Open Loop Vector.
Setting 75: Up 2
Setting 76: Down 2
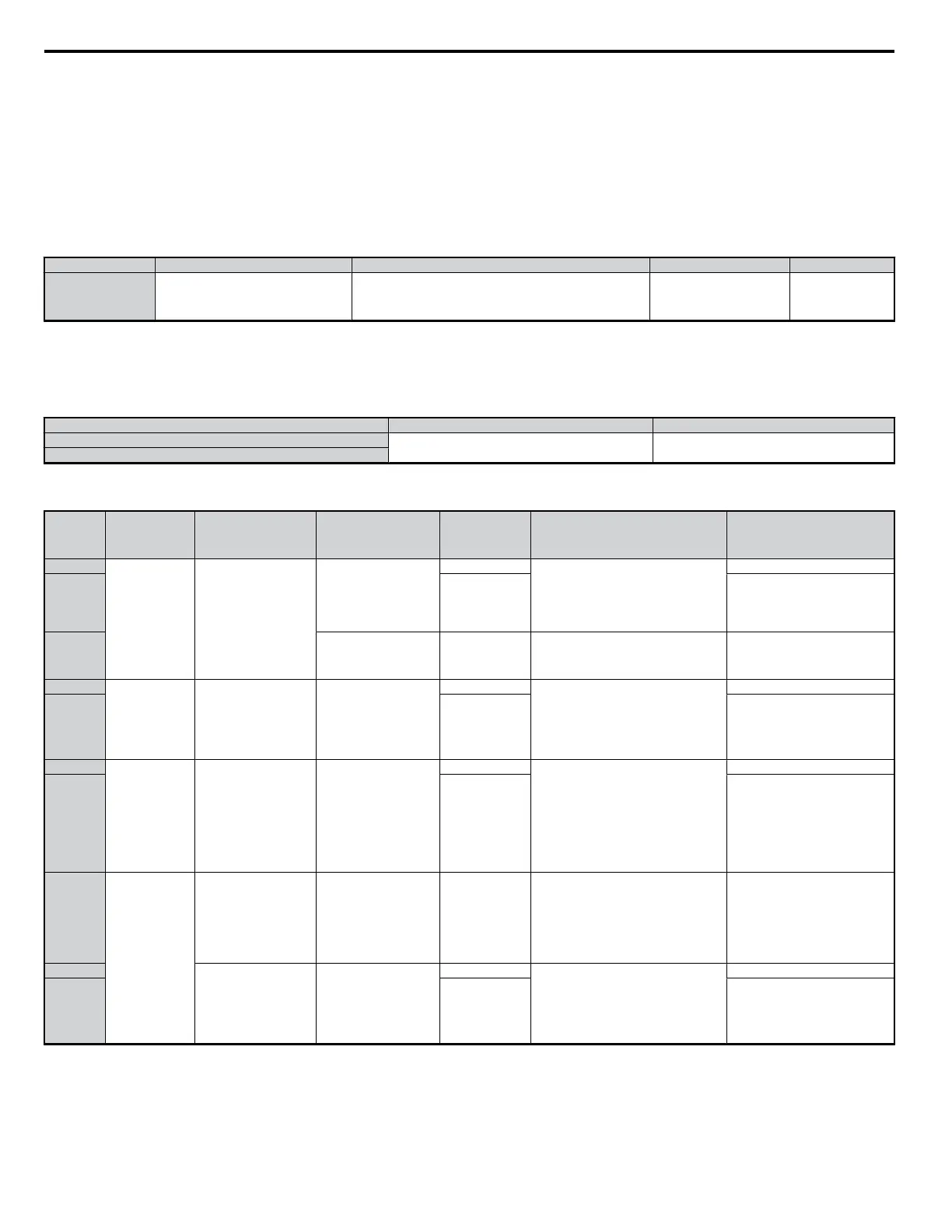
These functions raise or lower the frequency reference when the terminals close. For more information, refer to
Table 5.17 .
Settings for Terminals S1 to S7 Closed Open
75: Up 2
Increases or decreases the frequency reference No change (maintains present speed)
76: Down 2
Note: Set the Up 2 and Down 2 functions as a pair. This function requires that the source of the Run command be assigned to the control circuit terminals (b1-02 = 1).
Table 5.17 Up 2 and Down 2
Function
Frequency
Reference
d4-03 Frequency
Reference Bias Step
(Up/Down 2)
d4-05 Frequency
Reference Bias
Operation Mode
Selection (Up/Down 2)
d4-01 Frequency
Hold Function
Operation Frequency Saved
1
Multi-Step Speed
Reference
0
0
0
Accelerates while the Up 2 function is
closed, decelerates while Down 2 is closed,
holds the output frequency from the Up 2 or
Down 2 functions until the frequency
reference is changed. Operates with the
frequency reference in all other situations
Not saved
2 1
After the output frequency is held for
5 s, the value sampled with the Multi-
Step Speed reference during Hold is
set as the frequency reference, and
d4-06 is reset to 0.
3 1 --
Accelerates while the Up 2 function is
closed, decelerates while Down 2 is closed.
Otherwise operates by the frequency
reference
Not saved
4
Multi-Step Speed
Reference
0 --
0 When the Up 2 is enabled, drive accelerates
up to the frequency reference plus d4-03.
When Down 2 is enabled, drive decelerates
down to the frequency reference minus
d4-03. Holds the frequency after Speed
Agree is reached, otherwise follows the
frequency reference.
Not saved
5 1
After the output frequency is held for
5 s, the value sampled with the Multi-
Step Speed reference during Hold is
set as the frequency reference, and
d4-06 is reset to 0.
6
Other (analog
communications,
etc.)
0 0
0 While Up 2 is closed, drive accelerates.
While Down 2 is closed, the drive
decelerates. In both situations, though, the
drive will hold the bias until Speed Agree is
reached if the change in the frequency during
accel/decel is greater than the analog
frequency fluctuation limit. When Up 2 or
Down 2 is enabled, drive holds the bias until
the frequency reference changes. Otherwise
uses the frequency reference.
Not saved
7 1
After the output frequency is held for
5 s, the value sampled during Hold is
set to d4-06. The frequency reference
cannot be overwritten, so only the bias
is saved.
8
Other: Analog,
Comm., etc.
0 1 --
When the Up 2 is enabled, drive accelerates
up to the frequency reference plus d4-03.
When Down 2 is enabled, drive decelerates
down to the frequency reference minus
d4-03. In both situations, though, the drive
will clear the bias until Speed Agree is
reached if the change in the frequency during
accel/decel is greater than d4-07.
Not saved
9
0 --
0 When the Up 2 is enabled, drive accelerates
up to the frequency reference plus d4-03.
When Down 2 is enabled, drive decelerates
down to the frequency reference minus
d4-03. Holds the frequency after Speed
Agree is reached, otherwise follows the
frequency reference.
Not saved
10 1
After the output frequency is held for
5 s, the value sampled during Hold is
set to d4-06. The frequency reference
cannot be overwritten, so only the bias
is saved.
Setting 7A: KEB Ride-Thru 2, (N.C.)
Setting 7B: KEB Ride-Thru 2, (N.O.)
For details on KEB Ride-Thru 1, see page 169.
KEB Ride-Thru 2 adjusts the deceleration rate using load inertia data and regenerative power for smooth deceleration. This requires that the motor and
load inertia ration be set to L3-25, as well as the motor acceleration time caculated from inertia calculations be set to L3-24.
5.7 H: Terminal Functions
170
YASKAWA ELECTRIC SIEP C710606 18A YASKAWA AC Drive – V1000 Technical Manual (Preliminary)

 Loading...
Loading...










