12.5.11 0x604A/n Velocity quick stop
Highest sub-index supported
• Motion Control:
o Velocity mode
• Non motion Control (conf. ≠ x40)
• Motion Control:
o Table Travel record mode
o Profile Positioning mode
o Profile Velocity mode
o Homing mode
o Interpolated mode
o Move away from Limit Switch
The quick stop deceleration in velocity mode is set with object
velocity quick stop
.
Object
velocity quick stop
consists of
delta speed
in RPM and
delta time
in seconds.
The gradient of the frequency in the deceleration period is written to parameters
Emergency Stop (clockwise) 424 and Emergency Stop (anti-clockwise) 425
5, all data sets in RAM only !). Both parameters are set to the same value.
The values of p.424 and p.425 are converted internally to a frequency/sec value, ta
k-
ing into account the parameter No. of Pole Pairs 373 (in data set 1 !).
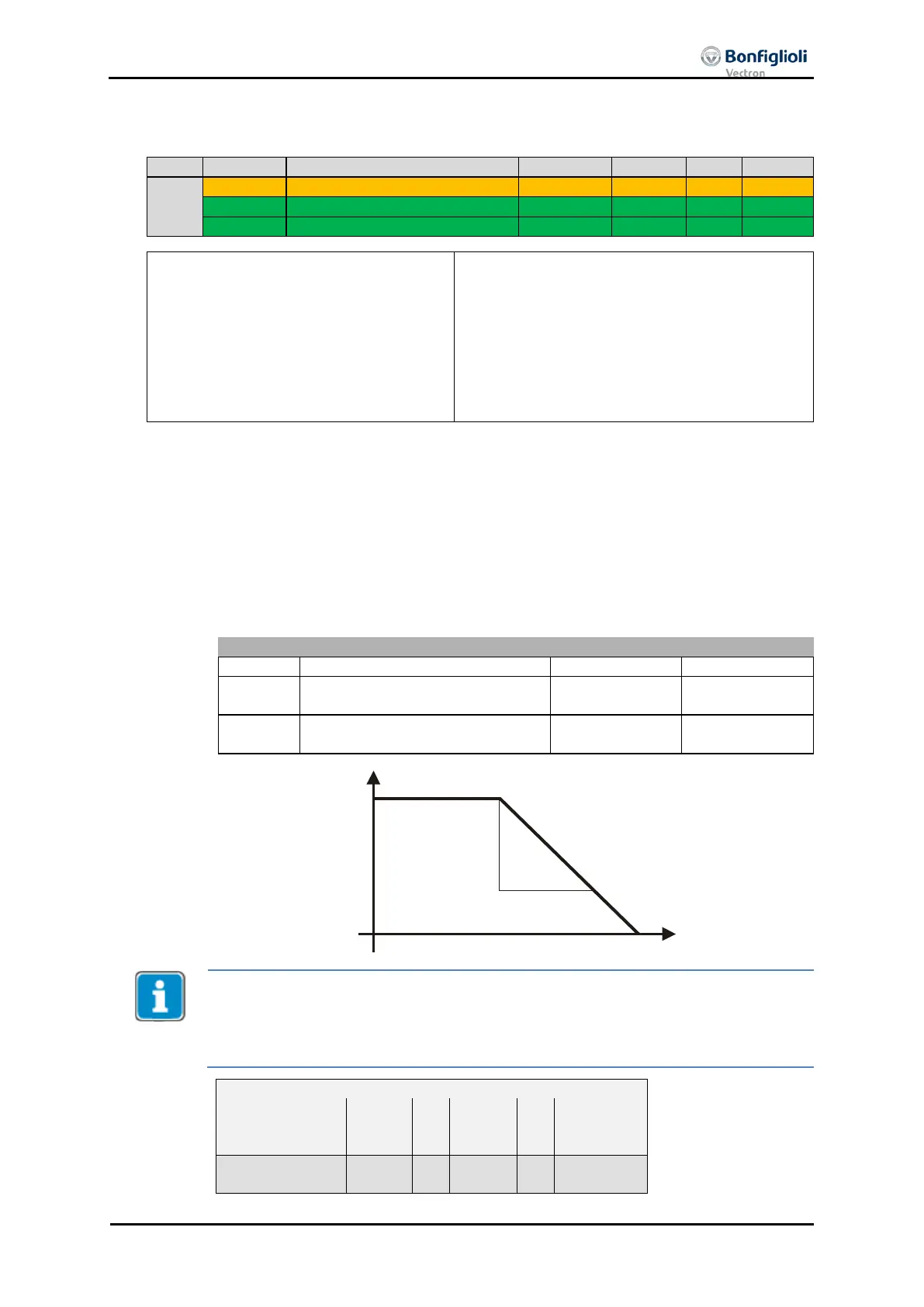
The gradient is changed internally by altering the objects delta time or delta speed.
0x604A/1 Delta speed (min
-1
) 1
0x604A/2 Delta time (sec) 1
delta speed
delta time
time
speed
If objects 0x604A/1 or 0x604A/2 were written and then a save parameters command
(object 0x1010
) processed, the object values are stored in non volatile memory. After
the next power on of the inverter, the previously set values are reactivated and ove
write the settings of Emergency Stop Clockwise 424 und Emergency Stop Counte
CB: Control byte SI: Sub Index All values in hexadecimal without leading 0x
04/13 CM-CAN ACU 123

 Loading...
Loading...






