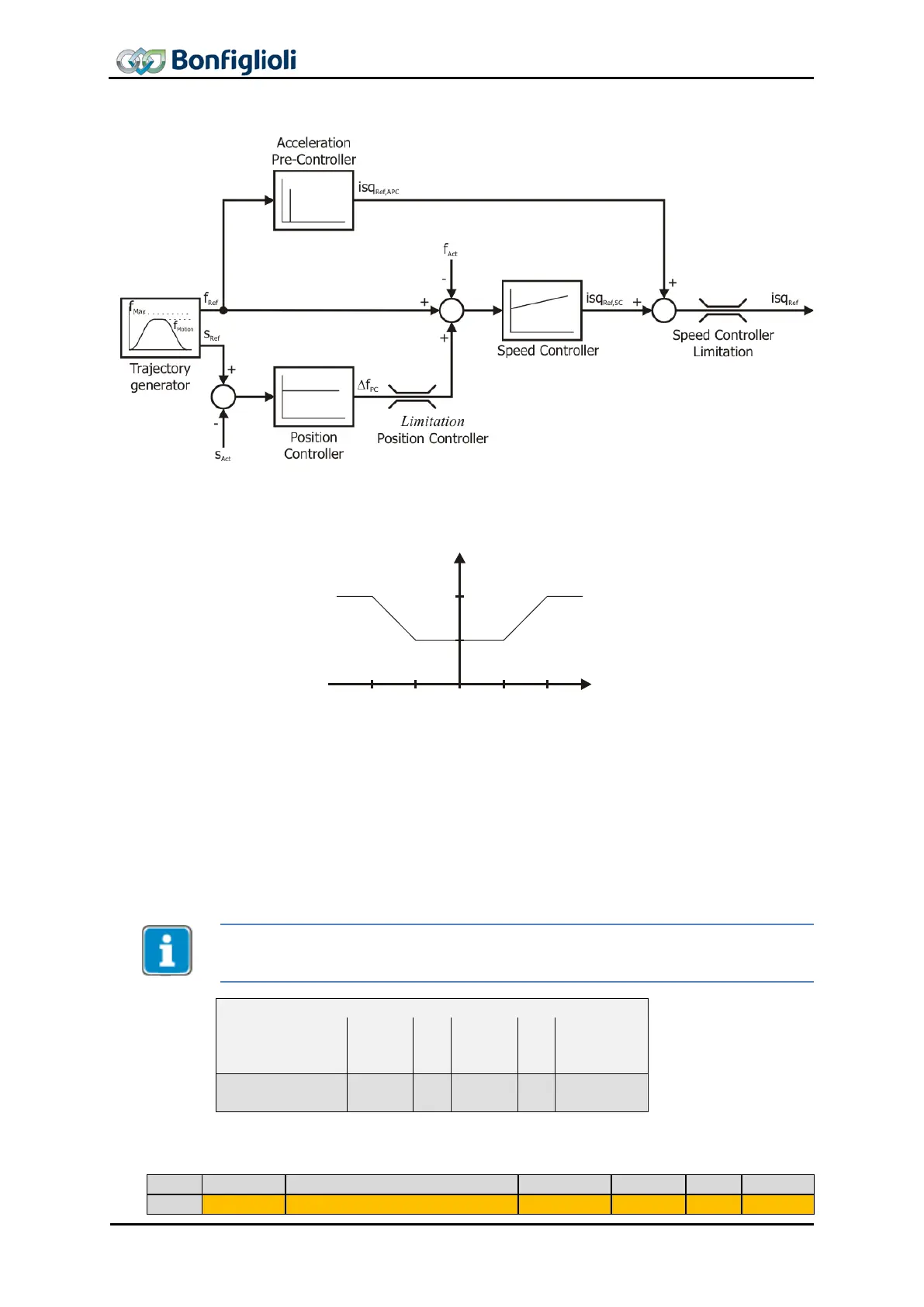
In order to avoid oscillations of the drive while it is at standstill, amplification is re-
duced to 50 % of the parameterized value for small position deviations
The following behavior may indicate that the controller parameters are not config-
ured properly:
− drive is very loud
− drive vibrates
− frequent contouring errors
For the setting options of other control parameters, e.g. speed controller and accel-
eration pilot control, refer to the operating instructions of the frequency inverter.
Optimize the settings in actual operating conditions, as control parameters for speed
controller and acceleration pilot control depend on actual load. Optimize with differ-
ent load types to obtain a good control behavior in all situations.
CB: Control byte SI: Sub Index All values in hexadecimal without leading 0x
12.4.23 0x5FF0/0 Active motion block
Amplification [%]
Control deviation
of position [°]
0.25-0.25 0.00
50
100
0.50
-0.50
108 CM-CAN ACU 04/13

 Loading...
Loading...






