13.6 Motion Control Interface for Experts
The Motion Control Interface offers the experienced user the possibility to change the
sources which will be used by the Motion Control Interface. By default, these are set
®
. Experienced users can change these in example to Systembus sources.
801 – Obj. 0x6060 Modes of Operation
802 – Obj. 0x607A Target Position
803 – Obj. 0x6081 Profile Velocity
804 – Obj. 0x6083 Profile Acceleration
805 – Obj. 0x6084 Profile Deceleration
806 – Obj. 0x6042 Target Velocity
S. Special Function
Generator
S. Target Velocity pv [u/s]
806 – Obj. 0x6042 Target Velocity
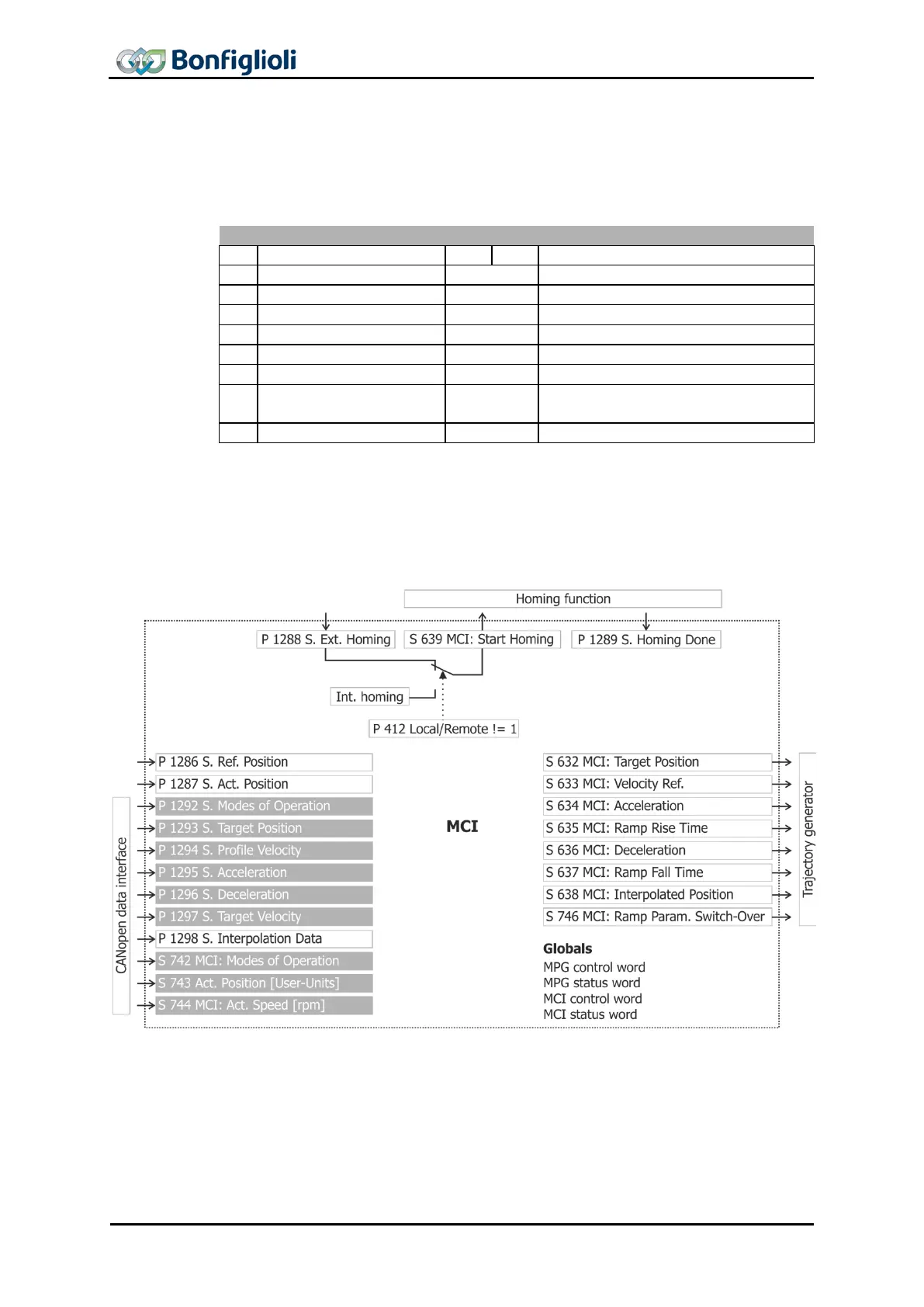
The figure below shows the parameters (P) and sources (S) that are defined in the
Motion Control Interface. For CANopen
®
, the settings have not to be changed. The
source outputs are linked to the Trajectory generator by
default and also need not be
changed in standard applications.
162 CM-CAN ACU 04/13