12.5.34 0x6086/0 Motion profile type
• Motion Control:
o Profile Positioning mode
o Profile Velocity mode
o Interpolated mode
o Move away from Limit Switch
• Motion Control:
o
o Velocity mode
o Homing mode
• Non motion Control (conf. ≠ x40)
Object 0x6086
motion profile type
defines the ramp behavior for accelera-
tion/deceleration.
Supported values for
motion profile type
:
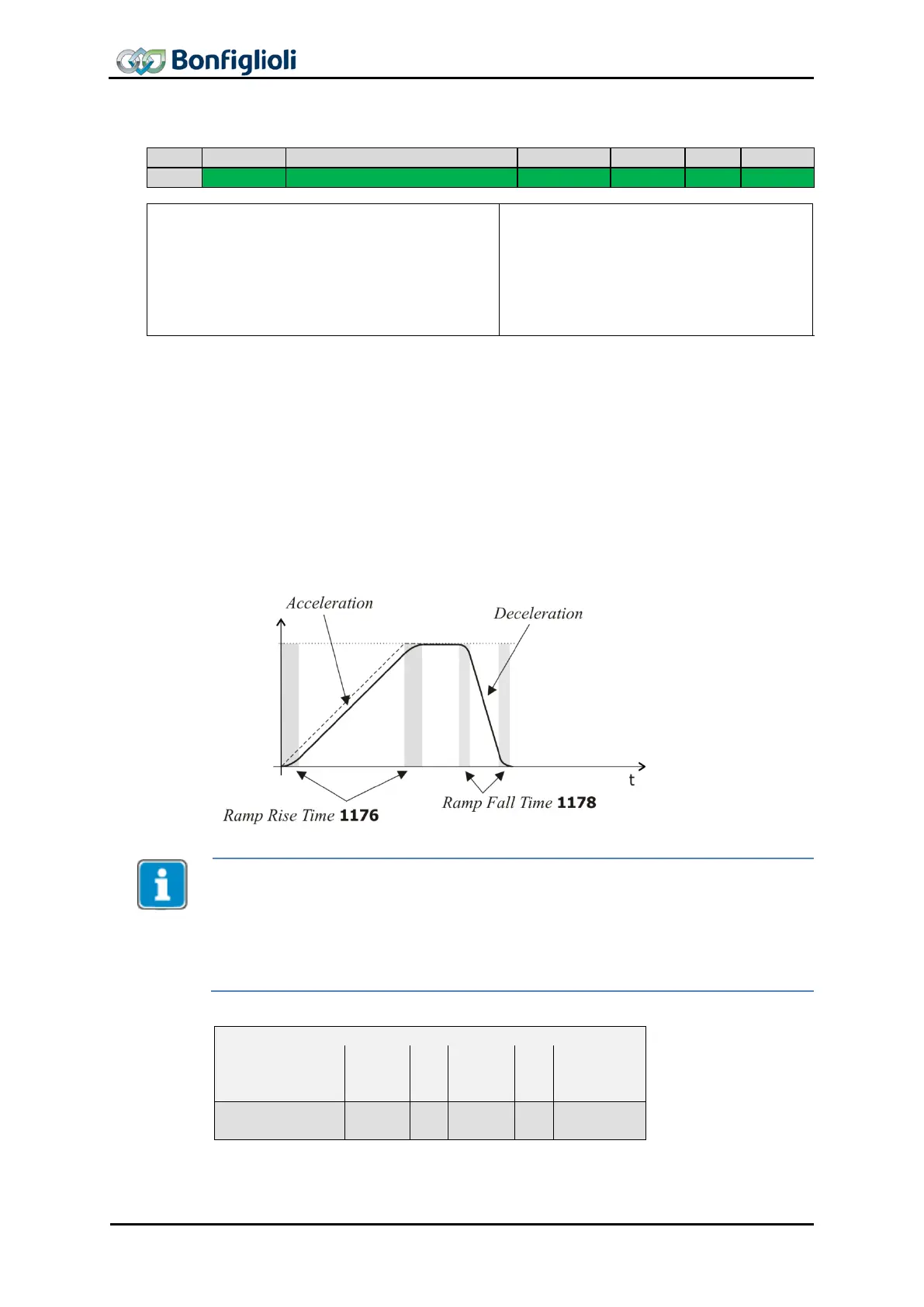
0 – linear ramp
3 – jerk limited ramp
In mode 3 “jerk limited ramp”, the ramp uses the parameters:
Ramp Rise Time 1176
Ramp Fall Time 1178
• The Ramp Rise/Fall time in
Table travel record mode
is defined via parameters
1205 and 1207.
• The Ramp Rise/Fall time in
Homing mode
is defined via parameter 1135.
• The Ramp Rise/Fall time in
Velocity mode
and in Non-Motion Control configu-
rations
is defined via parameters 430…433.
•
The Ramp Rise/Fall times in these modes are independent of the settings of
object 0x6086.
CB: Control byte SI: Sub Index All values in hexadecimal without leading 0x
142 CM-CAN ACU 04/13